

Author: Victor Miao
Mentor: Dr. Rico Picone
Taipei American School
Abstract
Robotics engineers use biomimicry to design machinery that is optimized for operation in aerial, aquatic, and terrestrial environments. This is explored through examining the field of biomimetic robotics, its purpose, definition, and benefits. Considered in detail are the unique sensing and actuation systems of biomimetic robots, including their application to locomotion and manipulation. The biomimetic techniques of more advanced robotic behavior, such as in navigation and localization, are also considered. Several different examples of biomimetic robots are described in detail. Biomimetic robotics offers a different perspective in the world of engineering. Whether it’s using animal locomotion systems, or adapting to the senses of different creatures, biomimetic robotics has a wide range of applications.
Section 1: Introduction
Section 1.1: Introduction and Evolution
Robotics engineers often use biomimicry to aid in the design of machinery in order to take advantage of evolutionary processes that have optimized the movement and navigation of creatures throughout the animal kingdom for aerial, aquatic, and terrestrial environments. These are the same environments in which humans seek to expand and improve their capabilities. In this case, evolution is the process of growth and development in order to survive, this can include developing stronger body parts or skills over time. Because biological evolution also optimizes systems for survival in unique environments, whether it is an aquatic or terrestrial environment, evolution has essentially served as a long-term engineering research and development process that has produced remarkable outcomes. Some examples include the adhesion properties of a gecko’s foot pads, or the lightweight bones and wing design of birds and bats – but it is how engineers are learning and applying these evolutionary byproducts that form the basis of biomimicry.
Section 1.2: Definition of Biomimetic Robotics
According to Paulson, the definition of biomimetic robotics is “the general description for engineering a process or system that mimics biology” (p. 1). For purposes of this research, however, this definition is not ideal. First, this definition omits the purpose and benefits of biomimetic robotics, failing to state why people decide to take inspiration from biology and the benefits derived from it. Secondly, the phrase “mimics biology” is too broad, a phrase that specifically targets the areas of mimicry in biomimetic robotics is needed. Therefore, for this research, the definition being used is: “Biomimetic robotics is the practice of emulating nature’s principles to help develop sustainable solutions to everyday problems of humans.”
Section 1.3: Overview
In the next section, an overview of the different types of biomimetic robots is presented, including specialized features and abilities made possible by sensors and actuators. In section three, the navigation and localization abilities of robotics is presented. In section four, a variety of examples of biomimetic robots are showcased. Lastly, section five will describe why humans decide to take inspiration from biology for designing robots.
Section 2: Sensing and Actuation of Biomimetic Robots
Section 2.1: Sensors
Some of the most advanced and varied functions of Earth’s creatures include the five senses, which are: vision, hearing, smell, taste, and touch. These five senses allow animals to protect themselves, travel through different environments, and distinguish between different items in their environments. In biomimetic robotics, engineers are able to duplicate these five biological senses by using a variety of sophisticated electronic sensors. In this subsection, each of these different sensors will be introduced, along with some other sensors that are not related to the five senses but are still used often in biomimetic robotics.
Section 2.1.1: Vision
In order for biomimetic robots to see, they must use what are called vision sensors. Vision sensors include Red, Green, Blue (RGB) cameras for capturing visual images and Light Detection and Ranging (LiDAR) cameras for light detection and navigation. But before we are able to understand how LiDAR and RGB cameras can be integrated into biomimetic robots, it is important to first understand how they work. Figure 1 depicts the process used by LiDAR cameras.
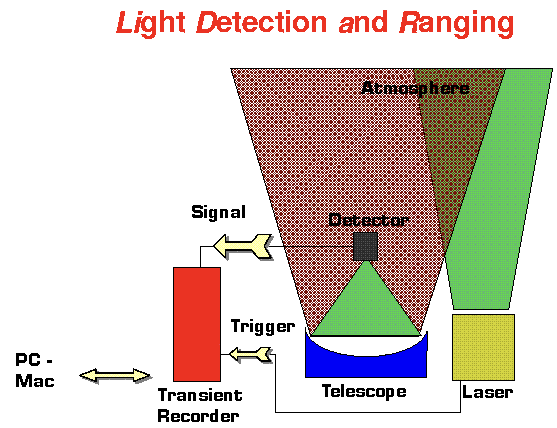
The diagram illustrates the basic operation of a LiDAR system. A laser emits light pulses into the atmosphere, which are scattered and collected by a telescope. The returning signal is detected and sent to a transient recorder, which logs the timing data and passes it to a computer for analysis. By combining the abilities of both LiDAR and RGB cameras, a biomimetic robot is able to perform the highly complex tasks of recognizing objects and tracking objects in motion.
Section 2.1.2: Hearing
Biomimetic robots are able to use hearing to their advantage by identifying sounds to create greater environmental awareness. Biomimetic robots use sensors to identify the direction of sound and the location of a sound’s source through a process called sound localization. Some of the common sensors used for robotic hearing include microphones and ultrasonic sensors. Ultrasonic sensors convert sound waves into electrical signals, which allows the robot to process the sound and then respond to the sound based on its programming.
Section 2.1.3: Smell
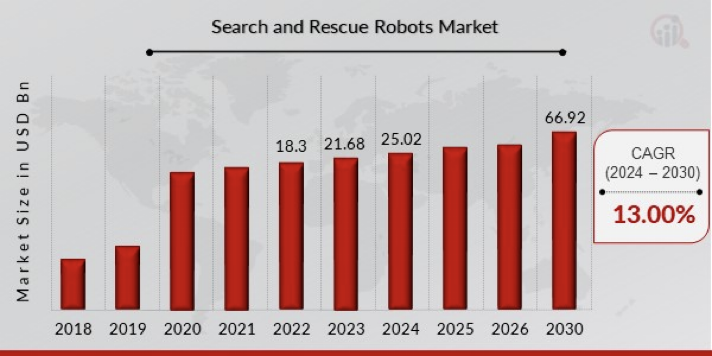
The sense smell in biomimetic robotics plays an important role in public safety when used by search and rescue biomimetic robots. These robots use E-noses and gas sensors to create a smell sense and can be used in ways similar to trained dogs. These robots are able to identify the desired objects or destinations based on the smell omitted and can be programmed to respond with alerts or actions accordingly.
Based on market research, Figure 2 shows that the need for search and rescue robots has been continuously growing, and is projected to increase to more than triple in size (Palwe, 2025, p 2). The ability of biomimetic robotics to effectively smell has played a significant role in this growth.
Section 2.1.4: Taste
Although biomimetic robots do not actually consume anything, they can still use special sensors in order to taste different objects. These sensors include liquid chemical sensors and taste sensor arrays. These two sensors use multiple chemical detectors to analyze the taste profile of different objects, allowing biomimetic robots to identify objects solely by detecting its taste. Common applications of using robots with taste sensors include airport security and for other types of hazard detection.
Section 2.1.5: Touch
Touch is arguably the most important sense for a biomimetic robot, since one of the most important functions of a biomimetic robot is to be able to move across varying environments and adapt as necessary. Some of the common applications for biomimetic robots with touch sensing abilities are for terrain navigation, hazard detection, and slip prevention. One of the commonly used sensors for these types of applications is known as the tactile sensor array.
As shown in Figure 3, the tactile sensor array is designed to accurately mimic the human fingertip by using layers of various sensors to optimize sensitivity.
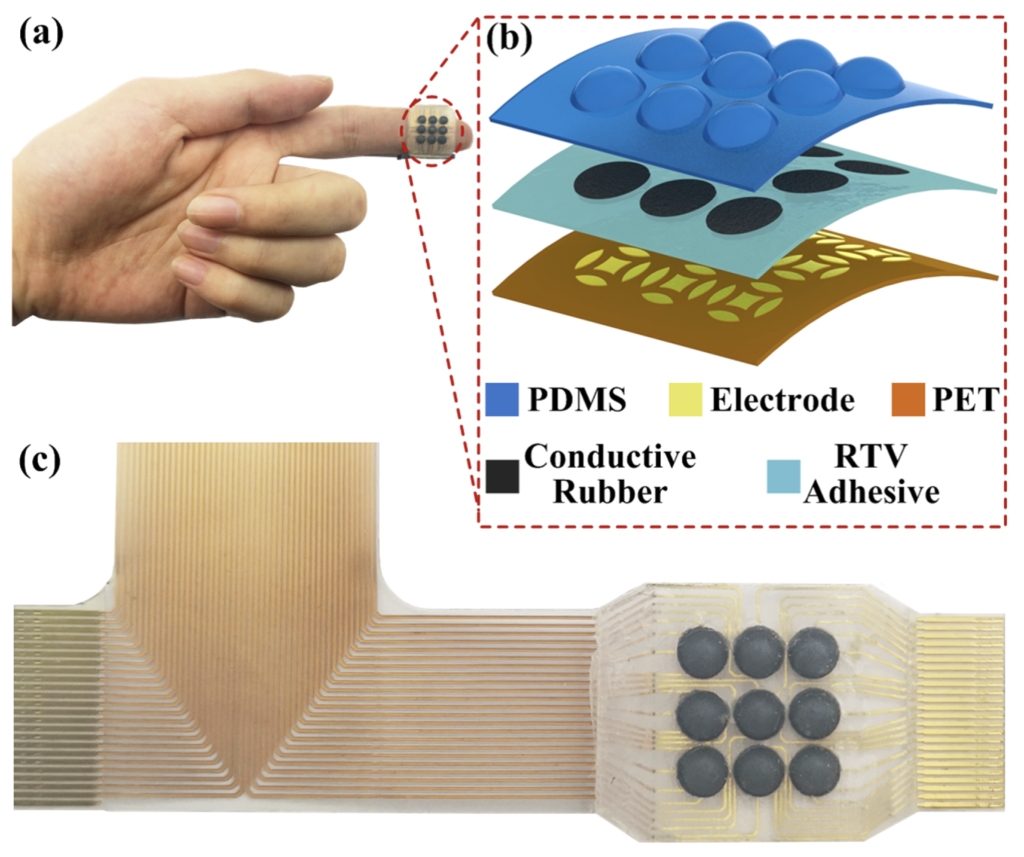
The diagram shows a flexible tactile sensor for robotic or wearable applications. Part (a) shows how the tactile sensor accurately mimics the human finger, while (b) details the sensor’s multilayer structure, conductive rubber and electrodes. Part (c) shows the complete sensor array, designed to detect pressure through changes in electrical properties.This allows biomimetic robots to ensure stable grip, exert the correct amount of force, and conduct tasks with a high degree of precision. The increasing sophistication of these biomimetic robots now allows these robots to interact with humans more safely.
Section 2.1.6: Other Sensors
Aside from the 5 senses, there are also several other sensors that are being used in biomimetic robots, these include torque sensors and airflow sensors.
Torque Sensors
Torque sensors are sensors that are used for measuring mechanical forces and torques, these sensors can be used for applications such as adjusting grip strength and to balance limbs. These traits can be especially helpful for four legged robots to balance themselves on the ground.
Airflow Sensors
Airflow sensors are sensors that are able to measure wind or airspeed, and these
sensors are specifically useful for aerial robots, because they are able to give feedback on flight stability. These sensors are another example of biomimicry as they are used to emulate how flying insects and birds use air currents to adjust wing motion.
An aspect of biomimetic robotics that all of the sensors mentioned above helps with a lot is locomotion and manipulation, which will be mentioned in the next section.
Section 2.2: Locomotion and Manipulation
The locomotion of biomimetic robotics is the ability of the robot to move from one place to another. Because of the significant challenges involved in terrain navigation, this was one of the original reasons why robotic engineers began using biomimicry and continue to use biomimicry in the design of robots.
Section 2.2.1: Motors and Actuators
All biomimetic robots use some version of a motor or actuator in order for the robot to be able to locomote. The following paragraphs provide an introduction to the most common motors and actuators used in biomimetic robots, along with some of their advantages and disadvantages.
Direct Current Motors
Direct Current (DC) motors are electrical motors that convert electricity straight to mechanical energy, and more specifically, rotational energy. DC motors are mainly used for continuous rotation in biomimetic robots, not only because of their precise speed and torque control, but also because of their simplicity in design and consequent reliability. Figure 4 provides a diagram of a typically designed DC motor.
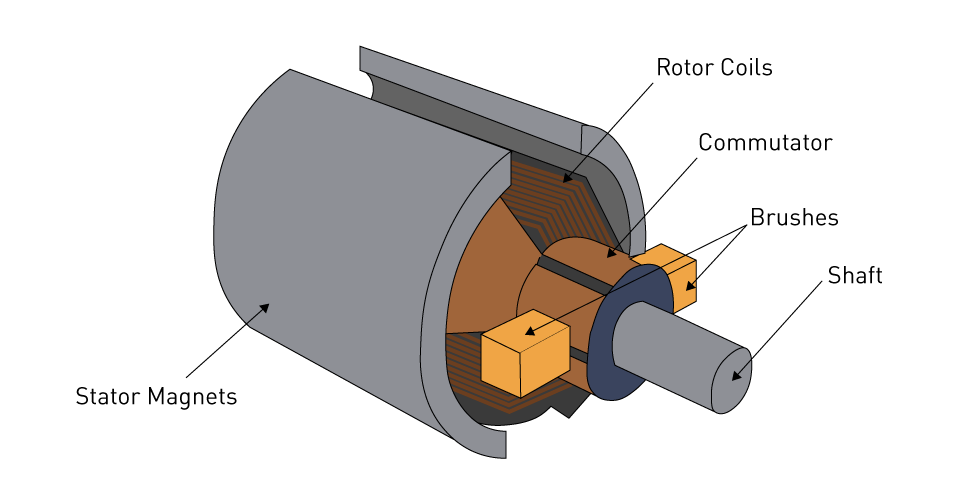
The diagram shows the internal structure of a brushed direct current motor. It includes stationary magnets surrounding rotating coils connected to a shaft. Electrical contact is maintained through brushes and a commutator, allowing the motor to produce continuous rotation. Another popularly used motor in biomimetic robotics is the servo motor.
Servo Motors
Servo motors are motors that are designed for precise linear and angular control. For this reason, servo motors are normally used for limb rotation and precise positioning. Even though servo motors usually have limited angle functionality, the control is very precise and is therefore highly suitable for joint control, since joints are also typically limited in terms of angle functionality. Figure 5 shows the key components of a servo motor.
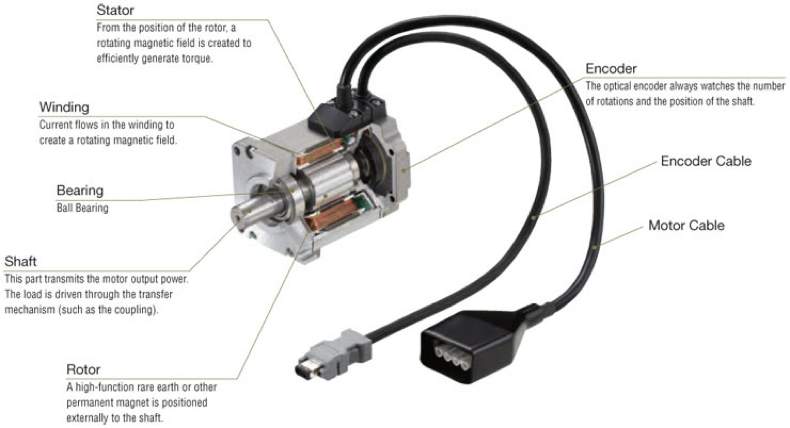
The diagram shows the components of a brushless direct current motor with an encoder. It includes a rotor with permanent magnets, a stator with windings to create a magnetic field, and a shaft for transferring power. An optical encoder tracks the shaft’s position and rotation, with cables connecting the motor and encoder to external systems.
While the motors described above provide the power needed to move a robot from one location to another, it is the design of the robot that ultimately determines whether the robot will actually be successful in traversing the environment. This is where, for robot engineers, biomimicry plays a critical role in systems design.
Section 2.2.2: Biomimetic Applications of Locomotion
In the previous section, the servo motor and DC motor were introduced as the two primary types of motors used for robotic locomotion. Both of these motors play a critical role in robotics movement but have quite different applications.
Direct Current Motors
In the field of biomimetic robotics, Direct Current (DC) motors are primarily used for driving legs, limbs, or flapping wings where continuous motion and continuous power is needed. DC motors are ideal in these situations because they usually have open loops for speed control, making it the best choice when continuous motion is required. DC motors can also power the different limbs of a robot individually. For instance, DC motors can be used to not only move each gecko’s limb, but also control the adhesion of that limb to the surface of the object being traversed.
Servo motors
Servo motors are mainly used for joint control in biomimetic robots, because servo motors provide real-time control of position, speed, and torque. Not only do they have built in sensors that are able to measure the position of joints at all times, they are also capable of repeatable and accurate movements. Servo motors play a critical role in duplicating the muscle-joint coordination for human-inspired robots.
Section 2.2.3: Biomimetic aspect of manipulation
Manipulation can be defined as the robot’s ability to physically interact with objects in its environment. Essential for the practical utilization of robots is the ability to mimic both large movements (gross motor skills) and small movements (fine motor skills)
Direct Current Motors
In manipulation, DC motors often provide the ability to provide power for lifting. This is because DC motors are often used in combination with pulleys or cables, allowing them to mimic muscles and to be able to lift various different objects.
Servo Motors
Unlike DC motors, servo motors are crucial for controlling multiple joints in fingers or tentacles, this makes servo motors crucial for the gripping aspect of manipulation. This is because servo motors allow independent joint control, similar to how humans and animals are able to move each finger individually.
Combining the sensors discussed previously and the motors discussed in this section, allow for biomimetic robot navigation and localization, which will be introduced in the next section.
Section 3: Biomimetic Robotic Behavior
The response a biomimetic robot has to its environment is referred to as its behavior. Robot behavior includes both the navigation process and localization. Depending on the programming and sophistication of the robot, behaviors may range from following simple commands to reacting to complex environmental factors.
Section 3.1: Navigation
Navigation in biomimetic robotics is how a robot perceives and adapts to the surroundings and its maneuvering towards a final destination, which includes moving towards goals, avoiding obstacles, and adapting to uneven terrains.
Section 3.1.1: The 3 Steps of Navigation
The process of navigation for robots requires three distinct activities, which are 1) search, 2) direction following, and 3) aiming. Only by successfully executing each of these three steps are robots able to accurately navigate to the desired destination.
Search
The first step of the navigation process is to search, which requires locating the final destination. The purpose of this step is for the robot to precisely know its final goal and to be able to process what the next step will be in reaching that goal.
Direction following
After processing the steps necessary to reach the desired destination, the robot must be able to follow the directions of the paths that lead to the final destination. It is at this stage where environmental adaptability comes into play. The robot must be designed with a sufficient range of functionality in order to be able to navigate various types of paths and several different types of terrain.
Aiming
Aiming occurs when the robot starts following the direction to reach its final goal, and it must be able to maintain the correct direction. For this to be successful, the robot needs to be able to determine its own location relative to the desired destination.
Section 3.2: Localization
In biomimetic robotics, localization refers to the robot’s ability to determine its position and sometimes also orientation in the environment. In biology, animals use several different methods to localize themselves, for instance, bats use echolocation and ants use the position of the sun. Several different methods of how biomimetic robots are able to localize themselves will be introduced.
Section 3.2.1: Odometry
Odometry is often used for determining a robot’s position and orientation over time by tracking its own movement. This is sort of like when humans use body position and balance to figure out where they are at what time (even when it is dark). There are several different ways odometry can be used in biomimetic robotics, but the most popular ones are wheel encoders and joint sensors. These odometry functions are able to measure the distance of how far the robot has traveled and then use that information to make calculations of the robot’s location.
Section 3.2.2: Vision-based Localization
Vision-based localization relies on vision sensors to determine the current position or state of the robot. One example of this is when the vision sensor locates the nearest wall or natural barrier on each side, allowing the robot to be able to determine its current position (Franz, 2000, p 138).
Section 3.3: Maps
In biomimetic navigation, maps are basically internal representations that help a robot understand its environment and how to navigate through it. There is navigation with and without maps, and there are also several roles that maps play in biomimetic navigation. In this section, we will be going over some of the benefits of navigation with maps and navigation without maps.
Section 3.3.1: Navigation with Maps
Biomimetic navigation with maps occurs when there are data structures in the robot’s memory that represent the layouts and features of specific environments. This allows a biomimetic robot to localize itself, plan paths, and navigate intelligently. The main advantages of navigation with maps are localization, memory, and learning.
In the animal world, octopuses are an example of a creature that uses navigation with maps. Octopuses use its visual and tactile memory in order to navigate complex reef environments using visual and tactile memory (Hamers, 2023; Pungor et al., 2023).
Section 3.3.2: Navigation Without Maps
Navigation without maps is when the robot moves around its environment without relying on an internal map. Instead, the robot uses sensors to process real time data in order to make navigation decisions. Although mapless navigation is good for lightweight robots with limited computation and for environments that have not been explored that much, mapless navigation lacks long term memory and its path planning can be limited.
Fish serve as a prime example of creatures that use mapless navigation. Fish uses their vision and perception of water flow to navigate through and around obstacles, rather than using an internal map to figure out directions.
Section 4: Examples of Biomimetic Robots
In this section, we will be going over some examples of biomimetic robots engineers have designed, including their purpose, design process, and areas of improvement.
Section 4.1: Gecko Inspired Climbing Robot
Purpose:
Because roofing is the 4th most dangerous job in all of the United States and there is a high risk of fatal injuries, there exists a strong need to improve the safety of this industry. For this reason, engineers have turned to animals and biomimicry to help mitigate the dangers people face when climbing and working at significant heights. In this case, the gecko is an ideal animal to examine because of its highly effective climbing abilities.
Design process:
In order to mimic the abilities of the gecko, engineers must first understand the three main reasons why geckos have such great climbing ability. First, geckos have effective adhesion pads on their feet. These adhesion pads do not employ sticky substances, but result from the use of van der Waal forces. Van der Waal forces are weak molecular bonds between the spatulae and the surface atoms. In this case, spatulae are tiny, spatula shaped structures found on the geckos’ feet – these are the main source for the van der waal forces. Although these forces are weak individually, they can be very strong when there are a large amount of contacts as is the case with the feet of geckos.
Second, geckos also have great climbing ability due to the beta-keratin protein structure of their feet, which makes the adhesion possible. Beta keratin is a fibrous protein found in reptiles and birds and is stronger and more rigid than the protein found on humans (alpha keratin). This results in both better grip and stability.
Third, geckos are relatively lightweight in terms of body mass and are easily able to support their own weight while climbing. This is a very important factor for not only the design of gecko robots, but also many other biomimetic robots.
In 2006, Carlo Menon and Metin Sitti from Carnegie Mellon University designed and created a gecko inspired climbing robot. They developed a relatively lightweight design and used silly putty for the adhesion pads, which provides a significant amount of normal adhesive force.

Section 4.2: Robofly
Purpose:
Unlike many robots in the biomimetic field that require heavy material and a large surface area in order for the robot to function, the robofly is quite the opposite. The robofly is an insect-sized robot that, like several highly evolved insect species, is optimized for aerial, aquatic, and land surface locomotion. This means that even though it is small in size, it is multifunctional and able to operate on several different kinds of surfaces.
Design process:
In 2021, Chutewad and Yogesh designed, created, and published a paper about the robofly. This robot uses simple fabrication and actuators to enable its aerial, aquatic, and land locomotion, and uses precise proportional integral derivatives (PIDs) controllers for accurate turning and motion.
This robot can achieve a water surface speed of around 151mm/s. Figure 7provides an image of the robofly after its fabrication.

Section 4.3: Project URSULA: A Biomimetic Squid
Purpose:
Due to the extreme amounts of waste and over-consumption in the environment in the 20th century, many experts believe that we are soon headed for a resource crisis. Although underwater environments are a critical source of food, energy resources, and fossil fuels, the environment is not suited for human survival. Consequently, Project URSULA (Unmanned Robotic Squid for Underwater and Littoral Applications), was created with the goal of designing a robot squid that could be used for underwater navigation and exploration.
Design Process:
In 2025, Berke Gur published a research paper regarding Project URSULA (Berke, 2025), a robotic squid meant for underwater manipulation. One of the main goals of this project is to increase access to underwater resources, since the human body is not very suitable for surviving underwater, especially in deep water environments. This robot was constructed with aluminum alloys to obtain a light weight structure and ultimately be able to traverse underwater with improved speeds. The soft limbs of the squid were modeled using silicon rubber materials while using some 3-D printed parts as anchor points.
The robot has a total length of 1800 mm and weighs 30 kg. A second model that is currently in development will be able to operate 100 meters below the ocean’s surface.
Section 5: Conclusion
Robot engineers are taking advantage of millions of years of evolution that have shaped the earth’s highly diverse animal kingdom in order to inform and inspire the design of biomimetic robots. These robots are now being used to solve real world problems. There are many jobs in the world that require humans to put their lives at risk, but with the help of biomimetic robots, these risks can be significantly reduced. Whether it’s climbing tall structures with a gecko inspired robot or navigating the ocean’s depths with a robotic squid, biomimetic robots are helping people to conduct work not only in a highly effective way but also without suffering the safety hazards that exist if humans were doing this work themselves.
The future of biomimetic robots appears bright. The advent of artificial intelligence (AI) and machine learning promises to propel the abilities of all robots, including biomimetic robots, to increased levels of operational functionality and effectiveness. The future evolution of biomimetic robots, however, will continue to depend on the close collaboration between biologists and engineers. While people often view the animal world as quite primitive compared to our high-tech modern society, the advancement of biomimetic robots actually appears to be bringing these two worlds closer together and in some of the most unexpected ways.
Bibliography
Chukewad, Y. M., James, J., Singh, A., & Fuller, S. (2021). RoboFly: An insect-sized robot with simplified fabrication that is capable of flight, ground, and water surface locomotion. IEEE Transactions on Robotics, 37(6), 2025–2040. https://doi.org/10.1109/TRO.2021.3075374
Franz, M. O., & Mallot, H. A. (2000). Biomimetic robot navigation. Robotics and Autonomous Systems, 30(1), 133–153. https://doi.org/10.1016/S0921-8890(99)00069-X
Gur, B. (2025, March 18). Project URSULA: Design of a robotic squid for underwater manipulation (arXiv:2503.13913) [Preprint]. arXiv. https://arxiv.org/abs/2503.13913
Hamers, L. (2023, July 21). Octopuses map their visual landscape much like humans do. Oregon News. https://news.uoregon.edu/content/octopuses-map-their-visual-landscape-much-humans-do
Menon, C., & Sitti, M. (2006). A biomimetic climbing robot based on the gecko. Journal of Bionic Engineering, 3(3), 115–125. https://doi.org/10.1016/S1672-6529(06)60015-2
Palwe, A. (2025). Search and rescue robots market: Trends and forecast 2023–2030. Market Research Future. https://www.marketresearchfuture.com/reports/search-and-rescue-robots-market-10599
Paulson, L. D. (2004). Biomimetic robots. Computer, 37(10), 48–53. https://doi.org/10.1109/MC.2004.121
Pungor, J. R., Allen, V. A., Songco-Casey, J. O., & Niell, C. M. (2023). Functional organization of visual responses in the octopus optic lobe. Current Biology, 33(13), 2784–2793.e3. https://doi.org/10.1016/j.cub.2023.05.069
About the author
Victor Miao
Victor is currently a Grade 10 student in Taiwan. His favorite academic course is math, and his main extracurricular activity is robotics.