

Author: Spersh Goyal
Mentor: Dr. Zion Tse
Menlo School
Abstract
Bionic devices represent a paradigm shift in healthcare and rehabilitation, offering a powerful means to restore, augment, and replicate human biological functions. With over one billion people worldwide living with some form of disability, the demand for sophisticated, naturalistic solutions to challenges like limb loss, organ failure, and sensory impairment is immense. This review provides a comprehensive analysis of the current state-of-the-art in bionics, encompassing a historical overview, an examination of major device types, an in-depth look at technological advancements, and a critical discussion of clinical outcomes, challenges, and future directions. We highlight recent progress in materials engineering, sensor-actuator systems, and neuro-interfacing, alongside key clinical findings that underscore the efficacy and transformative potential of these technologies. The paper also identifies persistent limitations, including issues of biological compatibility, device durability, cost, and accessibility, which continue to drive innovation. Finally, we project future trends, such as the integration of artificial intelligence, the development of closed-loop systems, and the emergence of biohybrid solutions, all of which point toward a future where bionics will provide not only unprecedented function but also seamless, personalized integration with the human body and nervous system. This review is intended for clinicians, engineers, and researchers working at the intersection of medicine, technology, and human-centered design.
Keywords: Bionics, Prosthetics, Brain-Computer Interface, Osseointegration, Neural Interfaces, Artificial Organs, Regenerative Medicine, Rehabilitation, Biohybrid Systems, Prosthetics, Biomechanics, Bioelectric Signals, Sensory Feedback, Actuators, Wearable technologies, Implantable technologies, Clinical Translation.
1. Introduction
Bionic devices—technologies that restore, augment, or replicate human biological functions—have emerged as a revolutionary response to the physical and social burdens of disability and organ failure. With more than 1 billion people estimated to live with disability worldwide, including 57.7 million with limb loss in the United States alone, the demand for effective, naturalistic solutions has never been greater (WHO, 2011). The World Health Organization’s report on disability in 2011 estimated that roughly 15% of the world’s population has some form of disability, with the number of people affected by limb disabilities in China reaching 24.72 million as of 2010 (Yang et al., 2024). In the United States, approximately 541,000 people had experienced upper limb loss as of 2005 (Yang et al., 2024), and an estimated 2 million limb amputees currently reside in the US, with around 185,000 amputations performed annually (Amin, 2022). In Europe, these numbers are similarly staggering, with an estimated 4.66 million amputees and 431,000 amputations occurring each year (Amin, 2022). Bionics addresses not only the physical restoration of mobility or sense but also the urgent need for social and occupational reintegration for individuals facing limb loss, paralysis, or organ insufficiency. Unmet clinical needs, such as persistent skin issues, discomfort, limited mobility, and poor device acceptance, continue to drive innovation in the field.
The objectives of this review are to comprehensively survey the current landscape of bionic devices, focusing on major types and technologies in use, analyzing recent advances that have driven the state-of-the-art, reporting clinical outcomes and patient perspectives, identifying major limitations presently encountered, and projecting future trends and opportunities in this fast-evolving arena.
By examining representative studies published between 2018 and 2024 (Table 1), we provide a quantitative assessment of the field’s trajectory, highlight persistent limitations, and outline emerging trends that are shaping next-generation bionics.
2. Overview of Bionic Devices
Within this review, a bionic device is defined as any engineered system that replaces, restores, or augments lost biological capabilities by interfacing with living tissues, actuating mechanical movements, or mimicking physiological functions. This includes:
- Bionic limbs: Upper and lower extremity prostheses where myoelectric control, osseointegration, and engineered feedback surfaces permit near-natural motor function.
- Bionic organs: Synthetically controlled, implantable or wearable devices that restore physiological functions, such as bionic eyes, artificial pancreas, and implantable cardiac devices.
- Neural interfacing technologies: Systems ranging from cochlear and retinal implants to brain-computer interfaces (BCIs), which decode or stimulate neural signals to enable movement, sensation, or communication.
2.1 Historical Evolution of Bionics
The field of bionics traces its roots from simple peg legs and hook hands to the first cable-driven prostheses and onwards to electronic and microprocessor-controlled myoelectric hands, which began to emerge in the 1960s (Lim et al., 2020). Landmark works in functional morphology and biomechanics, such as the seminal “On Growth and Form” by D’Arcy Thompson (1917), established principles later exploited in device mechanics. The 21st century has seen a convergence between miniaturized electronics, biocompatible materials, 3D/imaging-enabled customization, and neural engineering, enabling the development of sensor-laden and feedback-rich bionic systems (Silvestri et al., 2022). Additive manufacturing and virtual simulation now allow for highly individualized device design and pre-surgical planning, while Industry 4.0 frameworks promote seamless integration between digital, biological, and physical realms. The World Wars, particularly the German and former USSR’s response to the significant number of amputees, served as a major impetus for advancements in prosthetics research and development (Lim et al., 2020). Modern prostheses aim to restore function but must overcome challenges in residual limb interface, energy consumption (e.g., oxygen usage rises 9% in below-knee, 49% in above-knee, and 280% in bilateral amputations), and user comfort. Socket fit is particularly complicated by factors such as tissue swelling and weight changes, leading to common issues like skin sores and prosthesis abandonment (Amin, 2022). This highlights the critical need for a more symbiotic relationship between the biological residuum and the artificial device.
3. Current Types of Bionic Devices
The application and development of bionics can be segmented into several distinct but often overlapping categories, each addressing a unique physiological need.
3.1 Bionic Limbs
3.1.1 Principles & Technologies
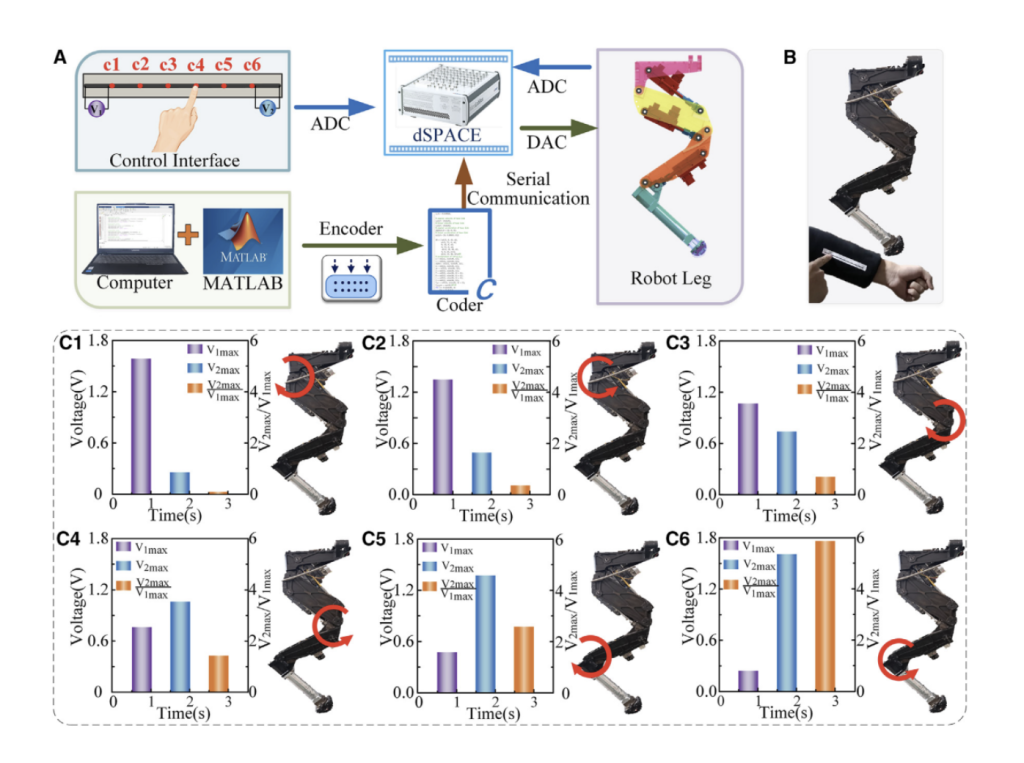
Modern bionic limb prostheses utilize a range of advanced control strategies to achieve intuitive, proportional movement. These include surface or implanted myoelectric sensors, which detect electrical signals from muscle contractions, and direct skeletal integration, known as osseointegration. Microprocessor-controlled knees and ankles dynamically adapt to changes in gait or terrain, while bidirectional communication—where feedback is returned to the user through sensory modules—blurs the line between biological and artificial function (Farina et al., 2021). Advances in powered ankle and knee joints, such as the Open-Source Leg (OSL) developed at MIT, have restored stable ambulation and even allowed subjects to climb stairs or navigate uneven ground (Ba et al., 2024; Farina et al., 2021). The OSL, a notable example of a robotic knee-ankle prosthesis, has demonstrated in benchtop testing a root mean square error (RMSE) between desired and actual motor current ranging from 0.5 A to 2.9 A per step (Ba et al., 2024). During ambulation, the device achieved heel strike with an extended knee at an average of 0.5 ± 0.7 degrees and controlled plantarflexion during early stance (Ba et al., 2024).
3.1.2 Key Studies & Examples
A perspective piece by Farina et al. (2021) highlights that while robotic limbs can convey environmental information with high precision, their performance is limited by existing interfacing technologies for bidirectional motor and sensory information transfer. The authors advocate for direct skeletal attachment via osseointegration and the amplification of neural signals through targeted muscle reinnervation (TMR), an approach where nerves that once controlled the amputated limb are surgically transferred to a different muscle (Farina et al., 2021). This allows for more intuitive prosthesis control through implanted muscle sensors and advanced algorithms.
- Osseointegration: Taylor et al. (2018) have developed custom osseointegrated implants for the tibia and humerus using personalized imaging, biomechanical testing, and finite element modeling to optimize stress distribution and minimize the risk of implant failure in long-term use.
- Clinical Cohorts: Recent studies demonstrate that direct skeletal fixation with bionic limbs results in markedly improved gait, reduced residual limb skin complications, and enhanced quality of life compared to traditional socket-based prostheses (Frossard et al., 2021). In multi-center trials, over 80% of amputees reported preferring their osseointegrated limb for activities of daily living and social participation (Frossard et al., 2021). An editorial on bionic limb prostheses further emphasizes that poor residuum-prosthesis interfaces often lead to discomfort, pain, and eventual abandonment, with innovative bionic approaches like osseointegrated implants offering promising solutions (Frossard, 2022).
- Myoelectric Upper Limbs: Devices such as the DEKA arm and Ottobock Michelangelo hand have demonstrated fine grasp and multi-articulated movement, supported by embedded controllers and proportional myoelectric input. A systematic review by Yang et al. (2024) notes that the weight range for advanced prosthetic hands typically falls between 400–600g, with output forces ranging from 60 N to 140 N. The review also highlights the significant cost barrier, citing examples like the BeBionic hand (approximately $11,000) and the i-Limb (around $18,000) (Yang et al., 2024).
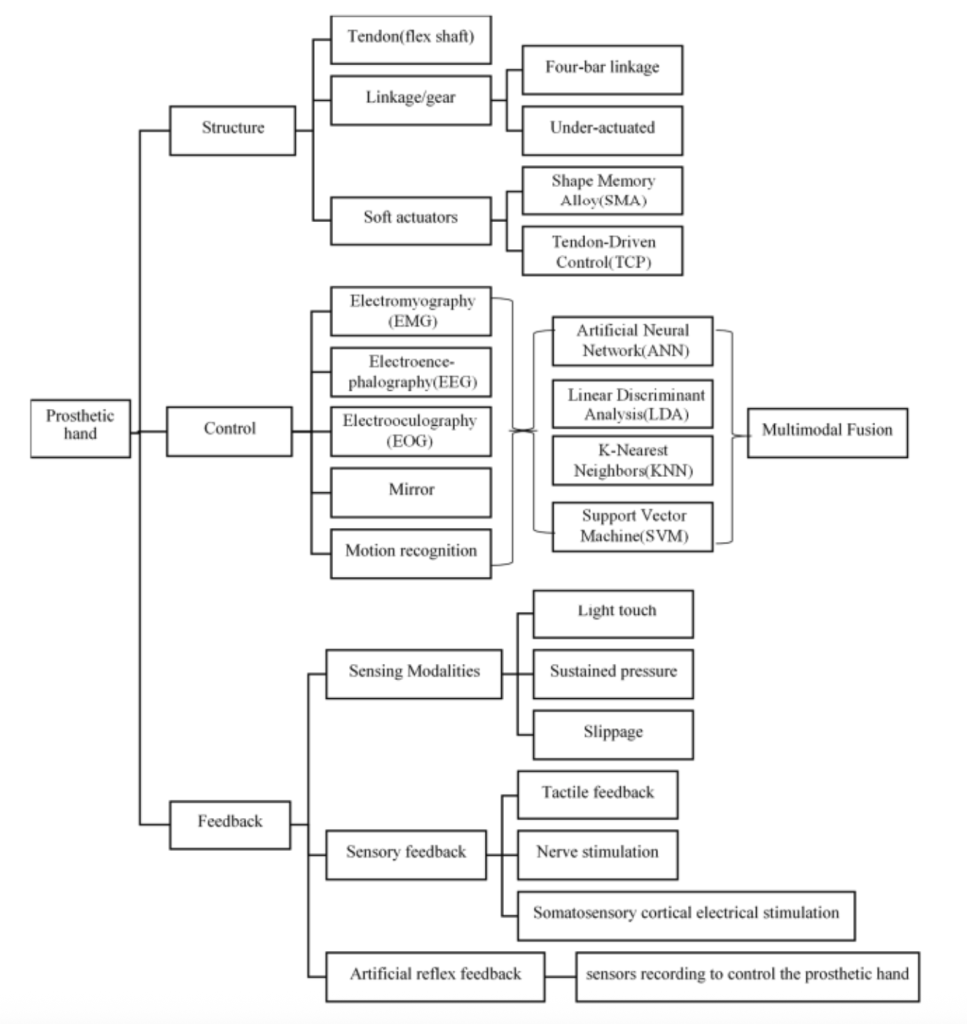
A key challenge in bionic limb control is the acquisition and interpretation of robust signals from muscle activity. A study by Briko et al. (2022) investigates a method of bionic control based on Electrical Impedance (EI), Electromyography (EMG), and Force Myography (FMG) signals, highlighting the potential for leveraging the unique characteristics of these signals for more intuitive and effective device control. Another important aspect is the provision of realistic sensory feedback. A study by Chen et al. (2023) focuses on advancing natural prosthesis control for upper-limb amputees by integrating somatosensory feedback, emphasizing the need for effective interfaces that can translate mechanical and tactile input from the prosthesis into neural signals comprehensible by the brain.
3.2 Bionic Organs
3.2.1 Principles & Technologies
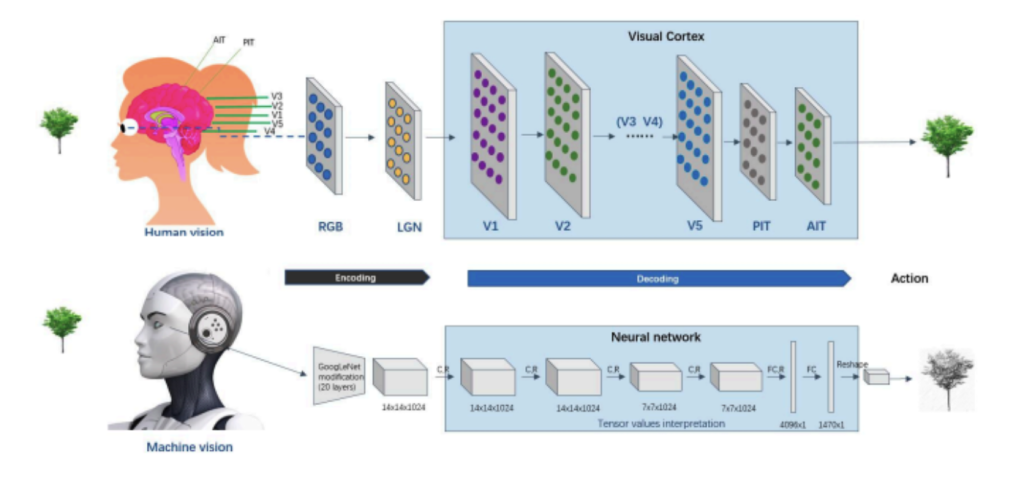
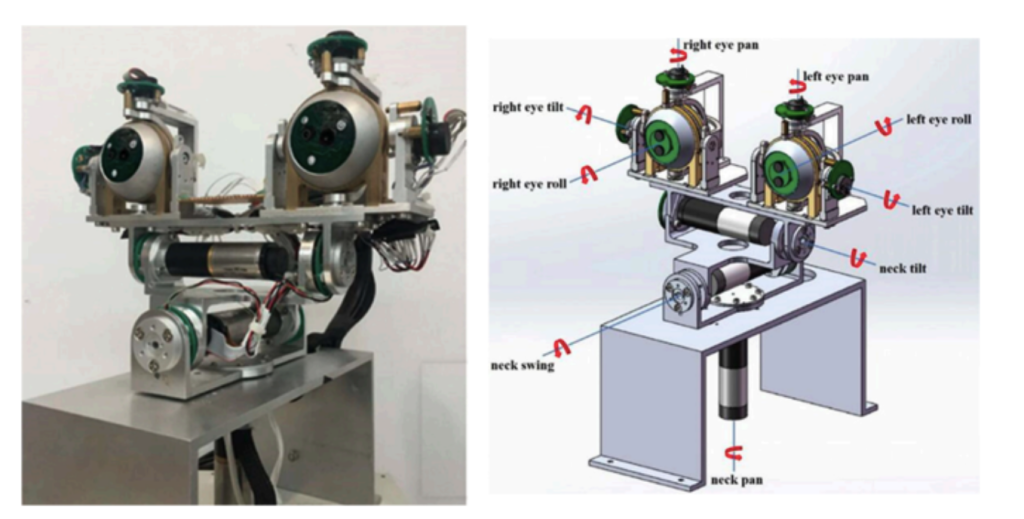
Bionic organ devices usually employ multi-sensor systems to monitor physiological states and closed-loop circuitry to deliver compensatory actions, such as insulin pumps reacting automatically to blood sugar fluctuations. In the area of sensory organs, the Argus II retinal prosthesis system delivers patterned electrical stimuli to retinal neurons, offering basic vision to patients with degenerative eye disease (He et al., 2022). A review by He et al. (2022) notes that the human eye contains approximately 7 million cone cells, primarily concentrated in the fovea, which are responsible for high-resolution vision and color distinction. The paper discusses the historical evolution of visual organs and provides quantitative data, such as the average amplitude of a saccade being 0.2 milliseconds, approximately half the diameter of a cone cell (He et al., 2022).
3.2.2 Key Studies & Examples
While a significant portion of bionics research focuses on limbs, the progress in bionic organs is noteworthy. Bionic pancreas and heart devices, though still emerging, are already demonstrating reductions in metabolic derangements and hospitalizations in clinical pilot programs (He et al., 2022). The development of a neuromorphic bionic eye has been a significant breakthrough (Anon, 2024). A study presents a hemispherical neuromorphic retina that uses a hybrid metal-oxide nanotube/perovskite nanowire structure to provide filter-free color sensing and neuromorphic preprocessing (Anon, 2024). This device operates in a self-powered mode and achieves a pixel density exceeding 109 nanowires per cm2, closely replicating the density of human photoreceptors. The system demonstrated high fidelity in reconstructing full-color images and improved classification accuracy in CNN tasks, showcasing its potential for advanced bionic vision (Anon, 2024).
3.3 Neural Interfacing Devices
3.3.1 Principles & Technologies
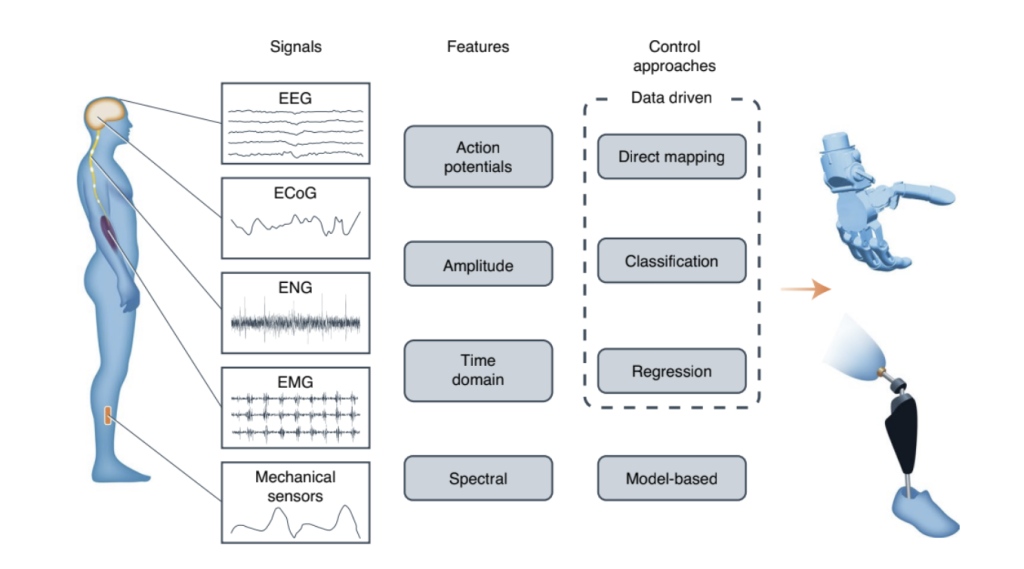
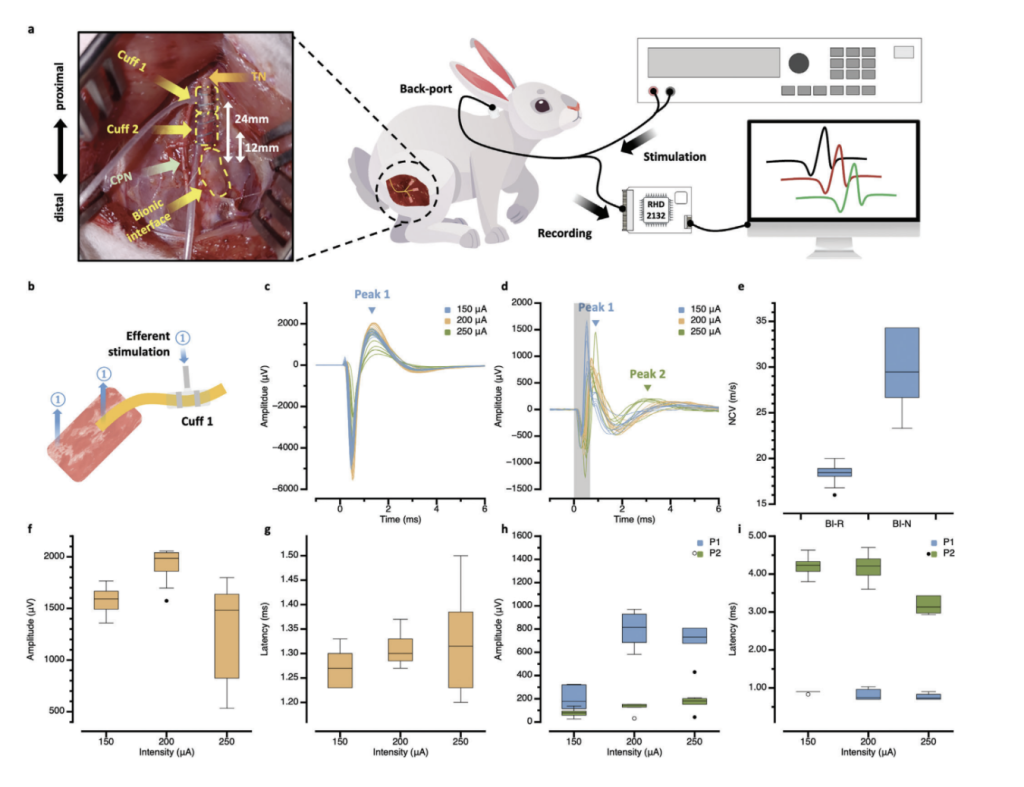
Cochlear implants, the most mature bionic interface, couple external microphones to implanted electrode arrays, directly stimulating cochlear nerve fibers. Brain-computer interfaces (BCIs) enable users to operate computers, wheelchairs, or robotic limbs by decoding intentionally generated neural activity—either invasively via implanted microelectrodes or non-invasively with scalp EEGs (Farina et al., 2021). A key challenge in neural interfacing is providing a long-lasting and stable connection between the bionic device and the nervous system. A study by Cho et al. (2023) explores the development of a hybrid bionic nerve interface to overcome limitations such as long-term stability and signal degradation.
A review of lower extremity reconstruction discusses several direct nerve interfacing technologies, including cuff electrodes, flat interface nerve electrodes (FINE), intraneural electrodes (e.g., LIFE, TIME, USEA), and regenerative sieve electrodes (Amin, 2022). While intraneural electrodes offer better selectivity, they also raise concerns about nerve damage, and long-term electrode failure rates are cited at 24-50% (Amin, 2022). The authors of a perspective on bidirectional bionic limbs emphasize that precision control hinges on decoding motor commands from nerves or muscles and delivering afferent sensory feedback through neural pathways (Anon, 2024). They highlight the need for a deep understanding of post-amputation pathophysiology, such as cortical reorganization and muscle coordination changes, which can lead to up to 30% shifts in co-contraction indices in residual limb muscles (Anon, 2024).
3.3.2 Key Studies & Examples
Recent multi-center studies show that advanced cochlear implant users achieve over 80% sentence recognition rates in quiet settings (Farina et al., 2021). New England Journal of Medicine trials demonstrate BCI users controlling robotic arms to perform functional grasp and manipulation tasks (Farina et al., 2021). A novel approach to powering neural devices is presented by Ba et al. (2024), who introduce an integrated Bionic Perception and Transmission Neural Device (BPTND) that harnesses the power frequency electric field as a direct energy source, eliminating the need for external batteries. This device boasts a rapid response time of 5 milliseconds, demonstrating its potential for real-time applications (Ba et al., 2024).
4. Technological Advancements and State-of-the-Art
The rapid evolution of bionics is underpinned by interdisciplinary breakthroughs in materials science, sensor technologies, and data processing.
4.1 Materials Engineering
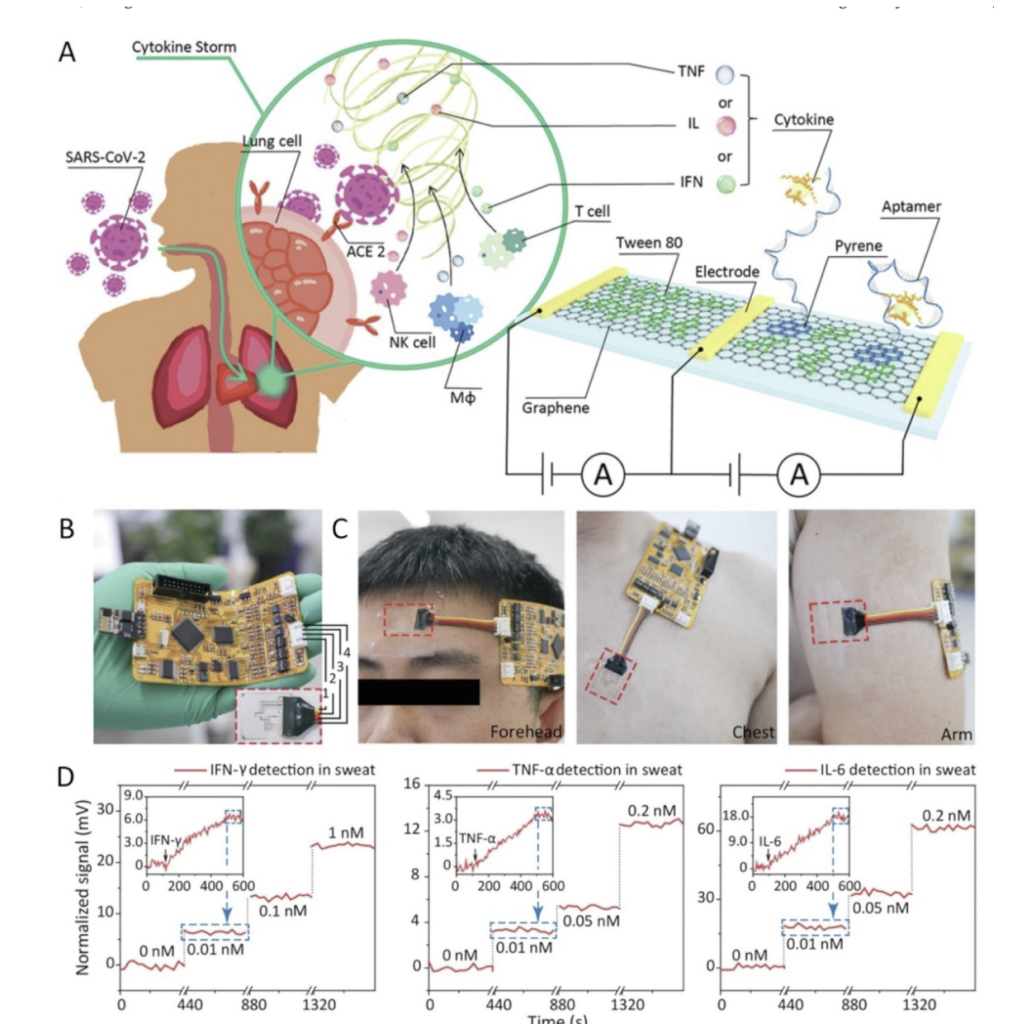
The success of bionic devices hinges on the development of materials that are not only mechanically robust but also biologically compatible. Breakthroughs include the adoption of medical-grade titanium and porous coatings to promote bony ingrowth and soft-tissue stabilization in osseointegrated implants (Frossard et al., 2021). Flexible circuit substrates and silicone-based elastomers enable compliant, resilient actuators and covers, which are pivotal for devices subjected to repetitive biomechanical strain (Frossard et al., 2021). The emergence of nano-bionics and the use of two-dimensional (2D) materials for wearable and implantable sensors are also transforming the field (Silvestri et al., 2022). Materials like graphene/PMA/CA hydrogel are being used in piezoelectric sensors to detect motion, paving the way for transparent bioelectronics and theragnostic nanoparticles that can enhance tumor detection accuracy (Silvestri et al., 2022).
4.2 Sensors & Actuators
Contemporary bionic limbs incorporate MEMS-based inertial sensors, load cells, and electromechanical actuators with embedded controllers, allowing joints to mimic the natural variable impedance and load response of intact musculature. For instance, MIT bionic knees adjust resistance and angle thousands of times per second for real-time adaptation (Ba et al., 2024). The integration of multiple physiological signals, such as EI, EMG, and FMG, is also a key advancement, allowing for a more robust and responsive control system (Briko et al., 2022). A novel development in sensory feedback is the concept of a thermally sentient bionic limb, which integrates microfabricated thermistors to sense temperature changes and provide intuitive thermal feedback to the user (Ortiz-Catalan, 2024). These devices have a sensor resolution of ±0.1 °C and a dynamic response time of less than 200 ms, and they have been shown to increase embodiment scores by 15-20% and reduce reaction delays in switching grip modes by approximately 150 ms (Ortiz-Catalan, 2024).
4.3 Neural Interfaces and AI Integration
Dense microelectrode arrays (e.g., Utah array) and novel bioelectronic interfaces allow for precise, stable neural communication, while machine learning-based decoding algorithms have improved both speed and accuracy of user intent recognition (Farina et al., 2021). Ultra-thin, conformable electrodes reduce the immune response and allow for closer, less-intrusive signal capture (Farina et al., 2021). A novel approach to powering neural devices is presented by Ba et al. (2024), who introduce an integrated Bionic Perception and Transmission Neural Device (BPTND) that harnesses the power frequency electric field as a direct energy source, eliminating the need for external batteries. This device boasts a rapid response time of 5 milliseconds, demonstrating its potential for real-time applications (Ba et al., 2024).
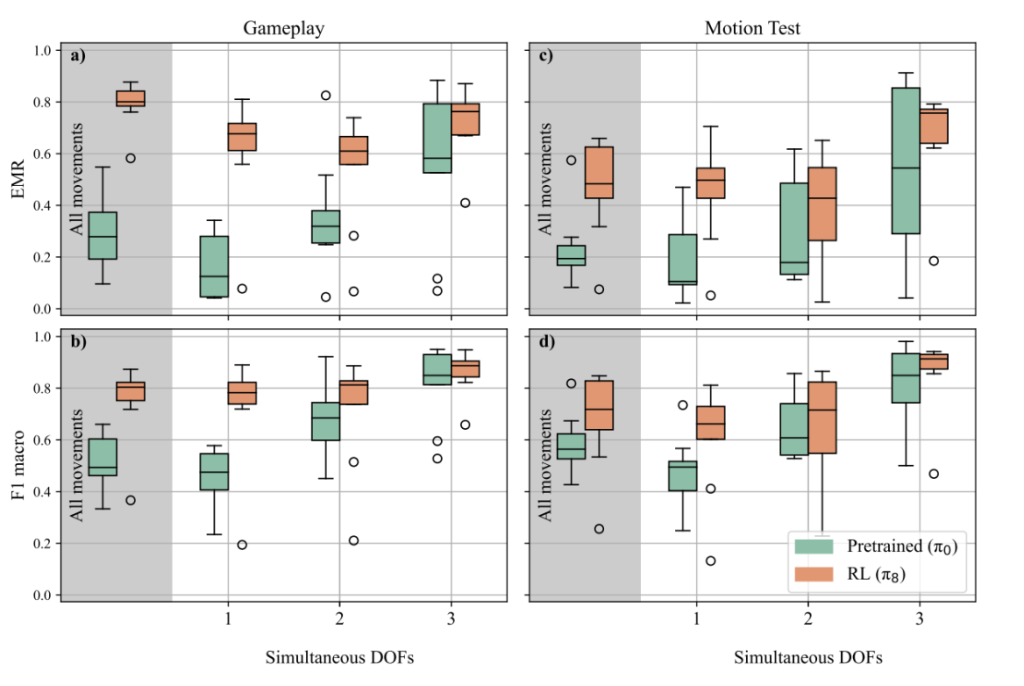
Recent work by Freitag et al. (2021) demonstrates the effectiveness of a reinforcement learning (RL) framework for improving real-time bionic limb control. While traditional supervised learning (SL) struggles with obtaining labeled EMG data as degrees of freedom increase, the RL framework trained on pre-recorded data and fine-tuned using interactive gameplay achieved a threefold increase in normalized cumulative reward (from 0.26±0.10 to 0.78±0.13) and a significant improvement in the Exact Match Ratio (EMR), a stringent metric for multi-label classification (from 0.30±0.16 to 0.79±0.08) (Freitag et al., 2021). This approach highlights the potential of dynamic, real-time human-in-the-loop interaction to enhance decoding accuracy and robustness, addressing the limitations of static models (Freitag et al., 2021).
4.4 Recent Landmarks
- Personalized Implants: The use of high-resolution imaging and modeling to customize geometry, maximizing load transfer and minimizing micro-motion at the bone-device interface, has been a significant step forward (Taylor et al., 2018). The development of personalized digital twins of humans is significantly influencing bionic limb research, particularly in surgical planning and implant design (Frossard et al., 2021).
- Advanced Bionic Knee Experiments: Real-world testing on various terrains has demonstrated the restoration of near-natural walking and a perceptible reduction in user anxiety over mobility (Ba et al., 2024).
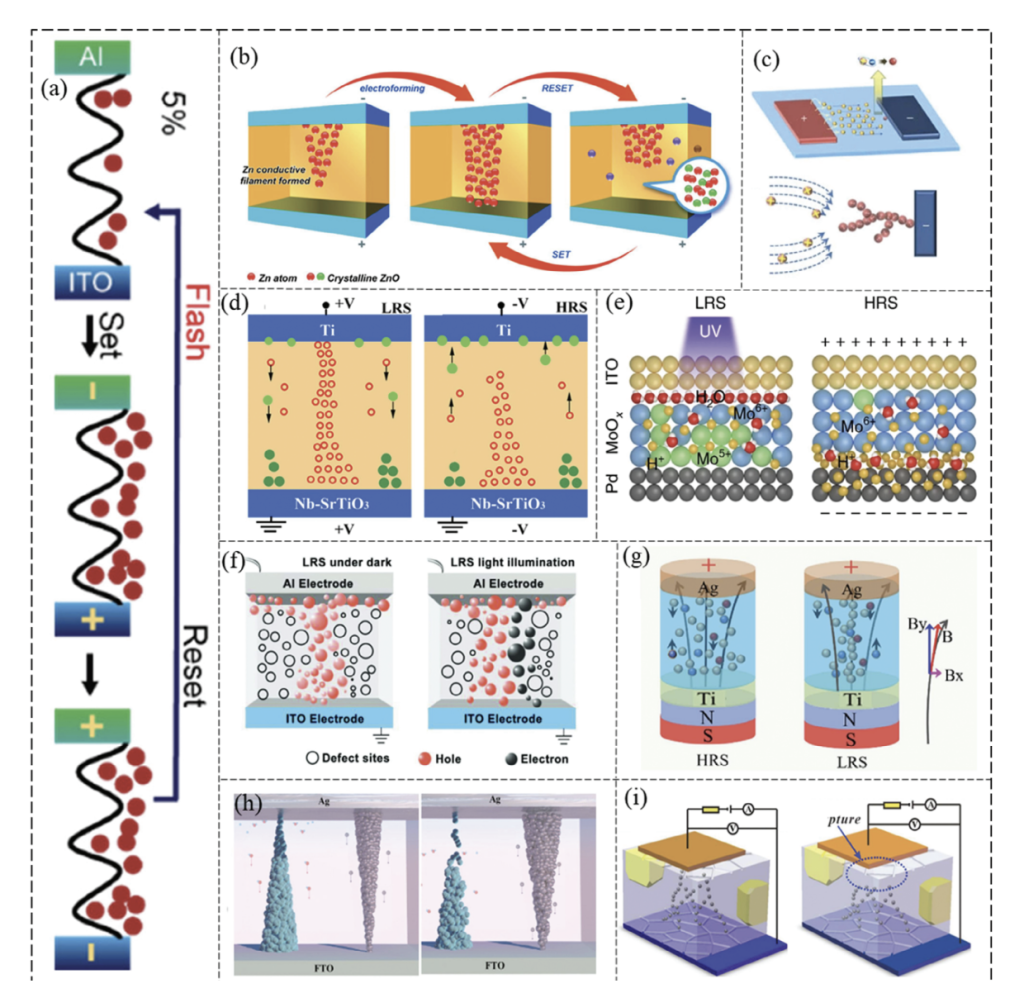
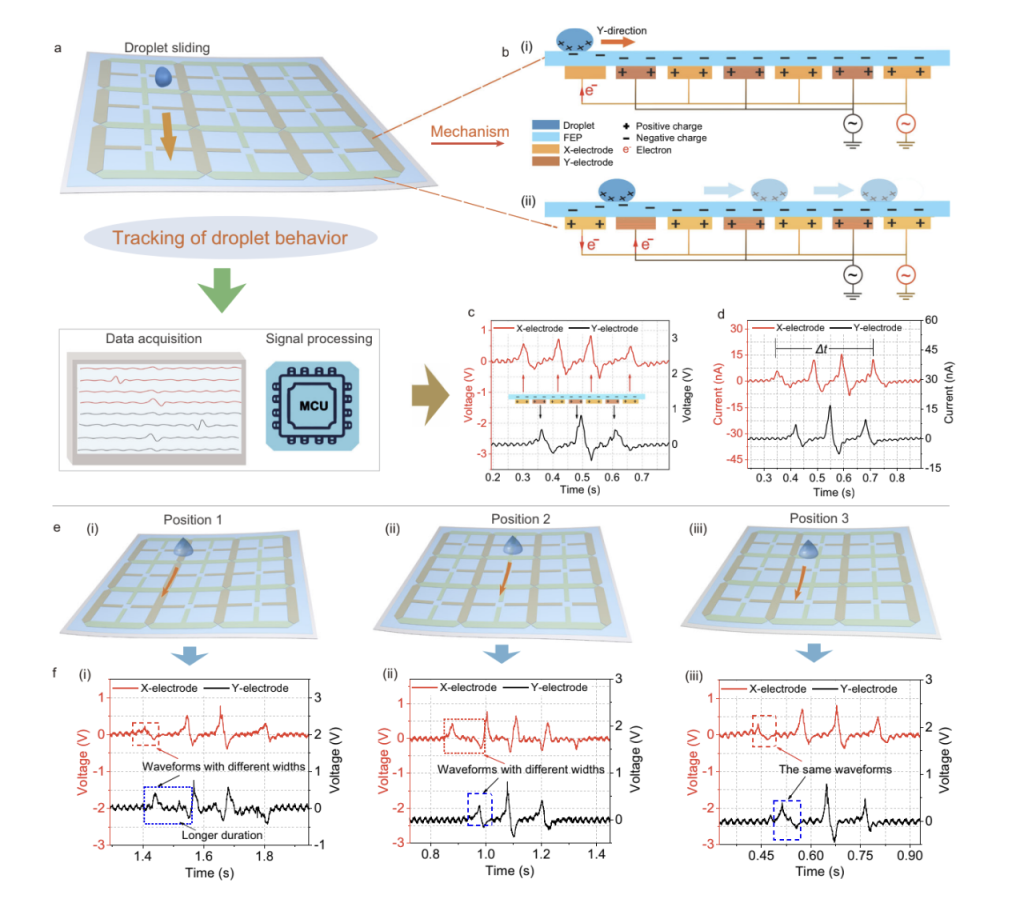
- Sensor-Integrated Prosthetics: Devices equipped with pressure, motion, and temperature sensors can inform both the user and therapist of fit, performance, and possible complications before they manifest (Yang et al., 2024). The development of bionic electronic skins (e-skins) with multi-directional sensing capabilities is also enhancing robotic perception and providing real-time feedback on liquid sliding behaviors, which is crucial for advanced prosthetic manipulation and control (Xu et al., 2024). The integration of memristor-based devices in e-skins and artificial nociceptors (pain sensors) is opening the door for next-generation AI by mimicking human tactile systems with high flexibility and low power consumption (Yang et al., 2023).
Figure from Hao et al. on electronic e-skins, describing a novel bionic e-skin designed for precise multi-directional droplet sliding sensing, aiming to enhance robotics perception:
5. Clinical Applications and Outcomes
The true measure of bionic technology’s success lies in its clinical efficacy and the tangible improvements it brings to users’ lives.
5.1 Clinical Trials
Osseointegrated Prostheses: Recent prospective and retrospective cohort studies involving hundreds of patients over multi-year periods have demonstrated significant benefits:
- Enhanced Mobility: Measured by tests like the Timed Up and Go (TUG) and Six-Minute Walk Test (6MWT), users of osseointegrated prostheses consistently surpass the performance of those with conventional prostheses (Frossard et al., 2021). An editorial highlights that powered ankle–foot prostheses can lead to reduced knee pain and better mobility (Pasluosta, 2022).
- Quality of Life: On validated patient-reported outcome measures (PROMs), users indicate significantly lower rates of pain and skin breakdown and higher rates of social participation and vocational engagement compared to socket-wearing controls (Frossard et al., 2021).
- Health Economics: From a health economics perspective, fewer device-related complications and reduced lifelong rehabilitation costs make osseointegration a viable long-term solution (Frossard et al., 2021).
Neural/Computer Interfaces: In controlled studies, BCI and advanced myoelectric users have been shown to regain basic functions, such as object manipulation and the ability to select computer outputs, with steady improvements over the last five years (Farina et al., 2021). A key finding from a study by Freitag et al. (2021) is that dynamic, real-time EMG data and human interaction significantly enhance decoding accuracy and robustness, potentially addressing real-world limitations of current myoelectric prostheses.
5.2 Rehabilitation and User Training
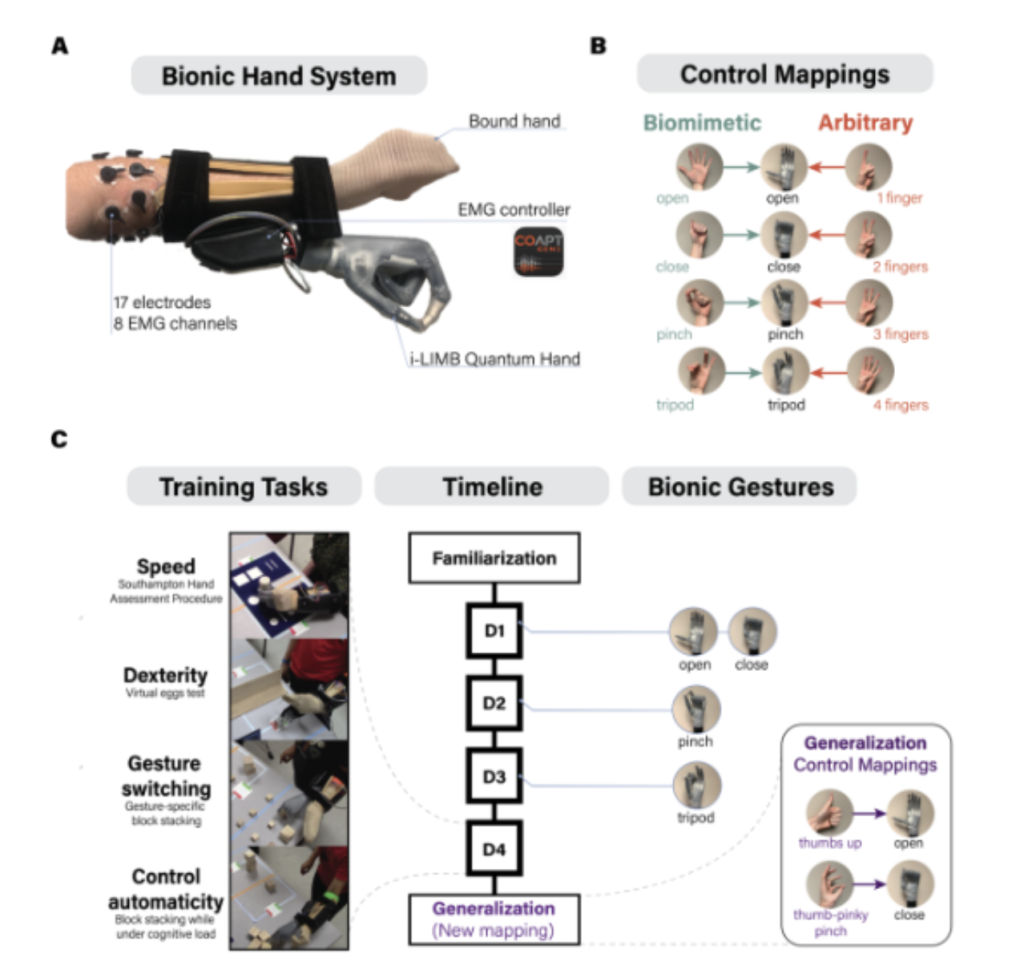
Effective integration of bionic devices requires more than just advanced hardware. Patient-centered programs that are tailored to each individual’s anatomical, physiological, and psychosocial needs lead to faster adaptation and increased device use. An editorial on bionic prostheses highlights that rehabilitation procedures and post-operative training protocols are often underreported, emphasizing the need for their standardization to ensure reliable outcomes (Schone, 2023). Studies have shown that while biomimetic control strategies for bionic hands may offer an initial advantage in speed, arbitrary control mappings can lead to similar long-term performance and even better generalization to new tasks (Pasluosta et al. 2022). This suggests that the brain’s plasticity allows for adaptation to non-intuitive control schemes, challenging the long-held assumption that bionic control must strictly mimic human motor patterns (Schone, 2023).
5.3 Patient Feedback and Usability
Qualitative and quantitative studies consistently show that positive reinforcement from medical staff, family, and the broader social environment strengthens identity and confidence in users of bionic devices (Frossard et al., 2021). Satisfaction is significantly higher in those who receive detailed training and whose needs are addressed in the design phase. Early user involvement in device development correlates with better usability scores on standardized surveys (Frossard et al., 2021). A study on thermally sentient limbs further illustrates this, showing that adding thermal feedback increased embodiment scores by 15-20%, reinforcing the importance of multi-modal sensory feedback in improving user experience and safety (Ortiz-Catalan, 2024.).
6. Challenges and Limitations
Despite the remarkable progress, the widespread adoption of bionic technology is hindered by several persistent challenges.
6.1 Technical Hurdles
- Durability: Many bionic devices require frequent replacement of electronic modules and batteries, and their components are subject to moisture, impact, and long-term wear, limiting their lifespan (Ba et al., 2024; Yang et al., 2024). A review by Amin (2022) notes that long-term electrode failure rates can be as high as 24-50%, underscoring the need for more robust materials and designs.
- Signal Quality: Myoelectric and neural interfaces can suffer from electrical noise, impeding smooth or accurate device operation (Briko et al., 2022). While advanced surgical techniques like TMR can enhance neural control, a significant portion of myoelectric limb users (around 30%) still abandon their devices due to issues like muscle fatigue and signal noise (Amin, 2022).
- Power: Battery size and longevity restrict the development of smaller or fully implantable systems (Ba et al., 2024). The BPTND’s self-powered concept represents a significant step towards overcoming this limitation (Ba et al., 2024).
- System Integration: A key challenge highlighted in the bidirectional bionic limbs perspective is the difficulty of achieving high information throughput for both motor commands and sensory feedback (Anon, 2024). Typical motor command decoding needs a bandwidth on the order of hundreds of bits per second, while sensory feedback may demand similar or higher rates, which existing systems may struggle to provide consistently (Anon, 2024).
6.2 Biological & Clinical Complications
- Compatibility: Immune response to metals, chronic inflammation at the tissue-device interface, and the risk of infection at percutaneous connections (particularly with osseointegration) remain leading complications (Frossard et al., 2021). Future solutions may involve tissue-engineered neural interfaces to mitigate scarring and improve long-term stability (Amin, 2022).
- Surgical Complexity: The implantation of advanced bionics demands highly specialized surgical skills, limiting their availability and scalability in lower-resource settings (Lim et al., 2020).
- Rehabilitation: Proper fitting and rehabilitation are critical for success, and a lack of access to specialized care can lead to poor outcomes (Lim et al., 2020). The need for standardized rehabilitation procedures and post-operative training protocols is a recurring theme in recent literature (Frossard, 2022).
6.3 Ethical & Regulatory Concerns
- Data Privacy: Especially for devices that record neural or behavioral data, cyber-vulnerability and data privacy are growing concerns that require robust security frameworks (Silvestri et al., 2022).
- Accessibility and Cost: The high cost of advanced bionic limbs, such as the BeBionic and i-Limb hands, and variable insurance coverage limit global access (Yang et al., 2024).
- Standardization: The diverse designs and customization of bionic devices make regulatory assessment and risk management more challenging (Lim et al., 2020). There is a call for a global ecosystem to align clinical, engineering, and user-centered approaches to standardize metrics and accelerate progress (Frossard, 2022; Anon, 2024.).
7. Future Directions
The next wave of bionics will be defined by advancements that address current limitations and push the boundaries of human-machine integration.
7.1 Closed-Loop Systems and AI Integration
The integration of real-time physiological and environmental feedback—from prosthetic sensors, neural signals, or wearable devices—will allow future bionic devices to anticipate and adapt to user intent, improving safety and autonomy (Farina et al., 2021). Machine learning and artificial intelligence will become central for intent decoding, adaptive control, and error prediction, particularly in multi-degree-of-freedom bionic hands and neuroprostheses. The use of memristors, which can mimic the brain’s synaptic plasticity, holds immense promise for creating more intelligent and adaptive bionic systems (Yang et al., 2023).
7.2 Energy Systems
New research supports the development of high-density, wireless-rechargeable energy storage, aiming to minimize maintenance and allow for fully implanted systems free from percutaneous connections, thereby removing a major infection risk (Ba et al., 2024). The self-powered BPTND is a prime example of this trend (Ba et al., 2024).
7.3 Biohybrid and Regenerative Solutions
Hybrid devices that marry engineered scaffolds with living tissue may eventually allow for growth, repair, or biological adaptation to user-specific conditions. The development of bionic e-skins capable of sensing and providing feedback on liquid sliding, for instance, is a step towards creating devices that are not just mechanical replacements but are truly integrated with the human sense of touch (Xu et al., 2024). A review by Amin (2022) suggests that future solutions could involve tissue-engineered neural interfaces to mitigate scarring and improve long-term stability, bridging the gap between prosthetic and biological systems. Vision: Over the next 5–10 years, bionics is poised to deliver not only unprecedented function but also fully personalized, seamless integration with the user’s body and nervous system. Widespread clinical adoption will depend on large-scale outcome studies, more affordable device manufacturing, robust policy frameworks, and deep collaborations with patients, providers, and payers. The field is moving toward a future where the device and the user are not separate entities but a single, integrated system, guided by both technological precision and an intimate understanding of human physiology.
8. Conclusion
Bionic devices mark a new era in medicine and rehabilitation, offering the promise of restored independence and well-being for millions with limb loss or organ dysfunction. Progress in materials, mechanics, and neural integration has delivered dramatic gains in mobility, comfort, and quality of life. Obstacles remain, particularly in device integration, chronic biological compatibility, and equitable access, but these are increasingly tractable as technology matures and global collaboration intensifies. The next generation of bionics will be defined by personalized function, real-time adaptation, and strong user partnership—transforming not only individual lives but the landscape of modern healthcare. Table 1: Overview of Bionics from 2018-2024 across a variety of metrics, emphasizing mechanical performance parameters, sensor–actuator integration, and clinical outcomes.
9. References
Amin, A. M. (2022). Bionic Limb Replacement: An Evolving Concept in Lower Extremity Reconstruction. Annals of Translational Medicine, 10(12), 693.
Anon. (2024). A neuromorphic bionic eye with filter‑free color vision using hemispherical perovskite nanowire array retina. Nature Communications.
Ba, K., Liu, G., Ma, G., Kong, X., Han, Z., & Ren, L. (2024). Bionic perception and transmission neural device based on a self-powered concept. Cell Reports Physical Science, 5(1), 101736.
Briko, A., Kapravchuk, V., Kobelev, A., Hammoud, A., Leonhardt, S., Ngo, C., Gulyaev, Y., & Shchukin, S. (2022). A Way of Bionic Control Based on EI, EMG, and FMG Signals. Sensors, 22(19), 7268.
Chen, J., Hao, C., Li, X., Tian, J., Zhang, Y., Li, Y., Cui, G., Wang, W., & Gao, H. (2023). Realizing Natural prosthesis control through somatosensory feedback: a review. Journal of Neural Engineering, 20(4), 043001.
Cho, B. -W., Jeon, H. -S., Lee, M. -H., Lee, S. -H., Hwang, J. -H., Park, J. -H., & Cho, J. -H. (2023). Hybrid Bionic Nerve Interface for Application in Bionic Limbs. Advanced Science, 10(15), 2206771.
Farina, D., Vujaklija, I., Brånemark, R., & others. (2021). Toward higher-performance bionic limbs for wider clinical use. Nature Biomedical Engineering, 5(9), 929-938.
Freitag, M., et al. (2021). Improving Bionic Limb Control through Reinforcement Learning in an Interactive Game Environment. arXiv.Frossard, L., & Lloyd, D. (2021). The future of bionic limbs. Research Features, (134), 74–77.
Frossard L., Conforto S., Aszmann O. (2022). Editorial: Bionic Limb Prostheses: Advances in Clinical and Prosthetic Care. Journal of Orthopaedic Translation, 34, 1-3.
He, X., Zhang, Y., Wang, X., Wang, Q., Li, W., Sun, R., Zhang, J., & Guo, S. (2022). Comprehensive overview of robot bionic vision technologies. Applied Sciences, 12(15), 7545.
Lim, M., Ghiasvand, G., Mittermaier, C., Tey, W., Gholamrezaie, H., & Baid, K. (2020). A Surgeon’s Perspective on the Current State of Bionic Limbs. EFORT Open Reviews, 5(2), 65-74.
Ortiz-Catalan, M. (2024). Thermally sentient bionic limbs. Science Robotics.
Pasluosta et al. (2022.). Bidirectional bionic limbs: a perspective bridging technology and physiology. Current Opinion in Biomedical Engineering.
Schone. (2023.). Should bionic limb control mimic the human body. Journal of NeuroEngineering and Rehabilitation.
Silvestri, A., Wetzla, C., Alegret, N., Cardo, L., Hou, H. -L., Criado, A., & Prato, M. (2022). The era of nano-bionic: 2D materials for wearable and implantable body sensors. Advanced Drug Delivery Reviews, 184, 114227.
Taylor, R., et al. (2018). Development of a novel osseointegrated prosthetic limb: A personalized medicine approach. Journal of Orthopaedic Research, 36(12), 3169-3176.
Thompson, D. W. (1917). On Growth and Form. Cambridge University Press.
WHO. (2011). World report on disability 2011. World Health Organization.
Xu, Y., Sun, Z., Bai, Z., Shen, H., Wen, R., Wang, F., Xu, G., & Lee, C. (2024). Bionic e-skin with precise multi-directional droplet sliding sensing for enhanced robotic perception. Nature Communications, 15(1), 1-13.
Yang, C., Wang, H., Cao, Z., Chen, X., Zhou, G., Zhao, H., Wu, Z., Zhao, Y., & Sun, B. (2023). Memristor-Based Bionic Tactile Devices: Opening the Door for Next-Generation Artificial Intelligence. Small, 19(34), 2207901.
Yang, J., Chen, Z., Fu, T., Ma, W., & Li, R. (2024). The latest research progress in bionic artificial hands. Micromachines, 15(1), 101.
About the author
Spersh Goyal
Spersh is a senior at the Menlo School in California. He is passionate about engineering and STEM in general. He works as the lead mechanical engineer of an FTC (First Tech Challenge) team that finished the 2024-25 season #11 in California (out of 228 teams). He interned at Roivant Sciences for the summer with their clinical development team. He co-led projects in analyzing the safety of autonomous vehicles using regression models and using DESY’s positron beam to enhance medical imaging techniques. He also cofounded a non-profit called Seeding STEMs, an organization that seeks to enhance the quality of STEM education offered to underserved communities. This non-profit is funded by venture capitalists/investors and one of its organization partners, Peninsula Bridge.
Spersh is also involved with clubs at his school, leading the Physics Club, Model Airplane Club, Business and Entrepreneurship Club, and Debate. He is passionate about solving real-world issues at the intersection of biology, mechanical engineering, data science, and physics.