

Author: Tauhid Noor
Mentor: Dr. Zion Tse
UC San Diego
Abstract
Recent breakthroughs in AI and neural interfacing devices are transforming the landscape of prosthetic capabilities, bringing us closer to creating bionic solutions that we can embody as natural limbs. This review paper looks at how that is possible by surveying cutting-edge advancements in surgical techniques, control strategies, and neural interfaces aimed at restoring human functions. The scope encompasses innovations in materials such as biocompatible polymers and titanium rods, as well as implantable systems like osseointegrated prostheses. Methodologically, the paper synthesizes findings from studies published in the last decade, highlighting state-of-the art bionic devices. Key findings demonstrate that recent technologies significantly enhance prosthetic functionality, user comfort, and sensory perception, which are important factors for improving the quality of life for amputees. Despite these technological leaps, challenges related to device durability, bio compatibility, data privacy and accessibility remain. Overall, this review underscores the importance of creating life-like, adaptive devices that seamlessly blend with our biological systems, ultimately creating a better life for individuals who suffer from limb loss.
Keywords:deep learning, reinforcement learning, artificial intelligence, bionic, prostheses, bi-directional, adaptive, osseointegration, neural interfaces, electromyography (EMG), electroencephalogram (EEG), electronystagmography (ENG)
1. Introduction
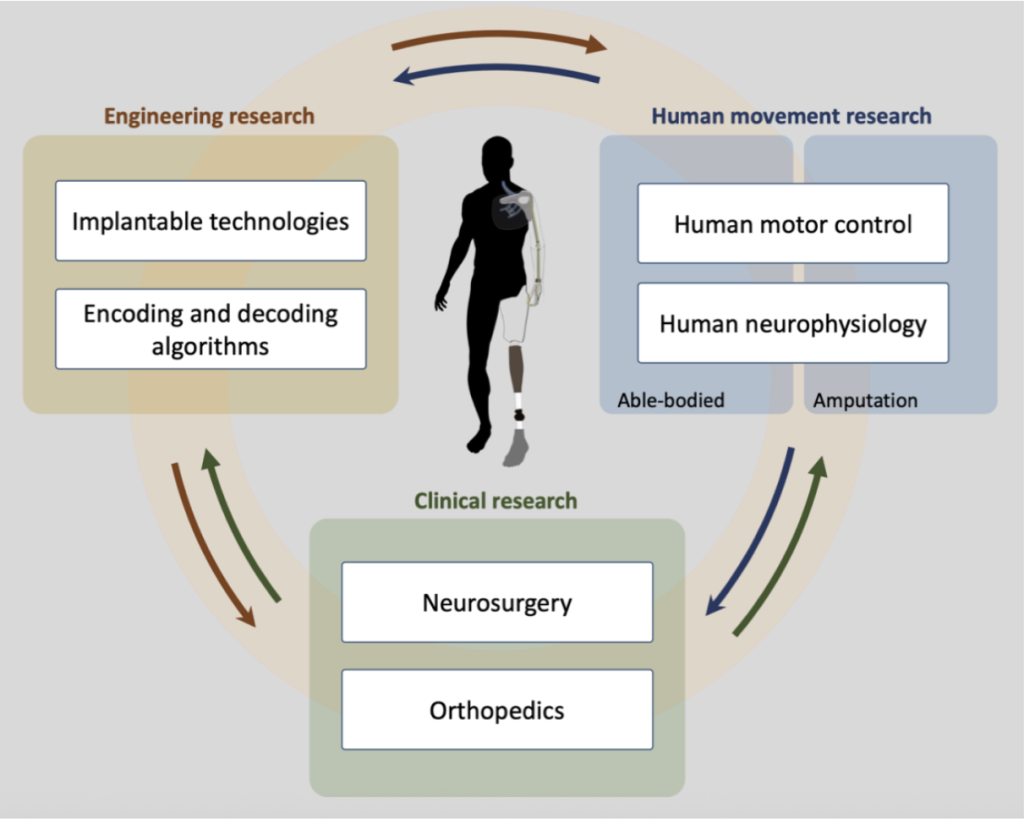
Bionic devices are advanced prostheses, implants, and neural interfaces designed to augment or restore natural human functions (Figure 1). The field holds major significance for society as millions of people globally suffer from major physical limitations that reduce their quality of life. As shown in table 1, more than 500,000 Americans have suffered from limb loss (Rivera et al., 2024). Moreover, from 2020, the annual rate of limb amputations is over 430,000 for people from all of Europe (Bumbaširević et al., 2020). Hence, many people await functional solutions that integrate technology with the human body. Despite the progress, challenges remain in restoring and nurturing natural human mechanisms, highlighting the need for more innovation.
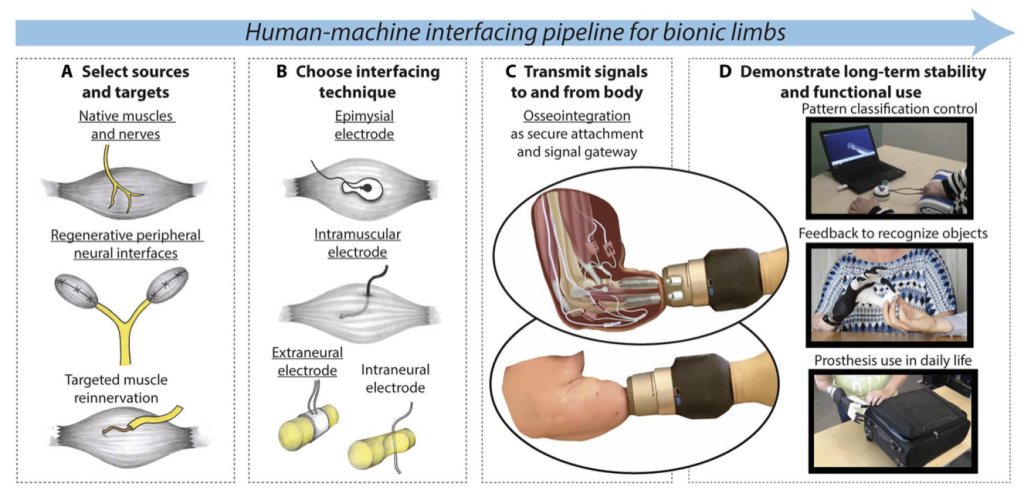
The selection of papers for this literature review was driven by a focus on the latest advancements in novel surgical techniques, integration of sensory components, adaptive control strategies, and machine learning algorithms. For novel surgical techniques, osseointegration is primarily discussed to highlight how setting up the residual area for a prosthetic is just as important as the prosthetic itself. For sensory components, their implementation brings the prosthetic limb closer to its biological counterpart by incorporating sensory information such as temperature perception or physical embodiment of the prosthesis. For adaptive control strategies, studies compare control schemes such as biomimetic and arbitrary controls with one another to identify ways in which one might be better than the other. Last but not least, papers that involve machine learning applications highlight how these advanced predictive models can be used to facilitate the learning process from internal signals to external movements.
The selected papers do not put much emphasis on logistical matters such as complete clinical trials, cost-effectiveness, or accessibility of these bionic solutions. The experiments that were conducted in these papers were to showcase a proof of concept, which means that the sample size collected was not sufficient in either volume or variation to pass as clinical trial data. Moreover, while the papers do highlight the significance of such advancements to the millions of people who suffer from physical disabilities, it does not discuss in great detail how such sophisticated technology can be made accessible to those who are constrained by their physical location or financial capacity. Nevertheless, this review attempts to discuss some of these challenges and limitations in greater detail to give a more holistic idea of the reality of the bionic solutions industry.
Overall, this paper aims to summarize recent advancements, identify existing limitations, and delineate future trajectories in bionic research and application.
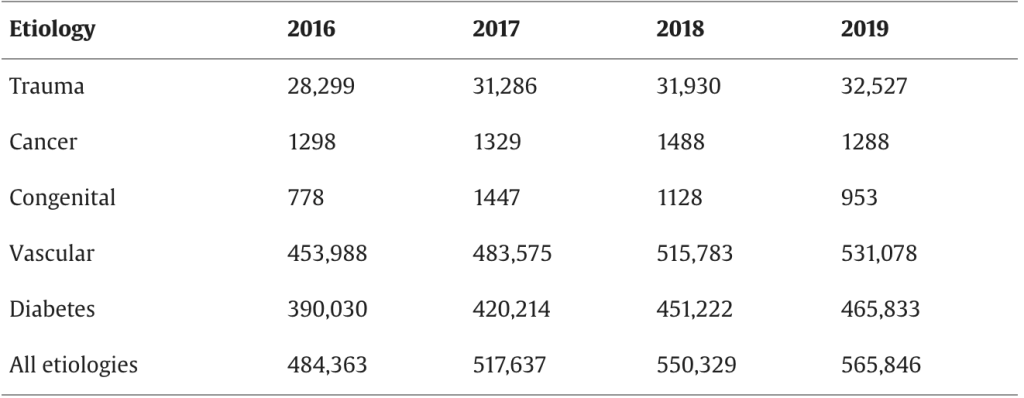
Table 1: Number of amputation procedures in the US from 2016-2019. Note that diabetes is nested within vascular diseases, so the diabetes row should not be included in the sum (Rivera et al., 2024).
2. Overview of Bionic Devices
Bionic devices include prosthetic limbs, visual and sensory augmentation systems, and neural interfaces that mimic or restore physiological connections. Historically, early prostheses relied on passive mechanical structures that felt like a separate entity from the human body. Earliest prostheses could be found as early as the Middle Ages, starting with hooks and continuing to Ambroise Paré’s mechanical hand to modern robotic, osteointegrated and bionic limbs, which are the results of both medical and technological progress. Modern-age prosthesis development was prompted as a consequence of the World Wars primarily due to the limb loss suffered in battles – first in Germany and then in the former USSR. However, recent decades have seen the integration of sensors, actuators, machine learning, neural interfaces, etc., that leverage the body’s electrical activity to build sophisticated bi-directional bionic solutions (Bumbaširević et al., 2020).

3. Current Types of Bionic Devices
In this review, bionic devices will be broken down into 3 basic structures: bionic limbs, bionic eyes, and interface devices (Figure 3-5).
3.1 Bionic Limbs:
Recent research demonstrates sophisticated control systems for lower-limb and upper-limb prostheses primarily due to the implementation of electrodes that pick up electrical signals – using EMG, ENG, and EEG – from the muscles, nerves or brain, and classify them typically into biomimetic movements typically through machine learning algorithms that are trained on these signal patterns. The movements are later translated into commands for the hardware motor to execute as actual gestures. Moreover surgical techniques like osseointegration have been applied to not only augment the performance of these devices but reduce physical discomfort for the amputee.
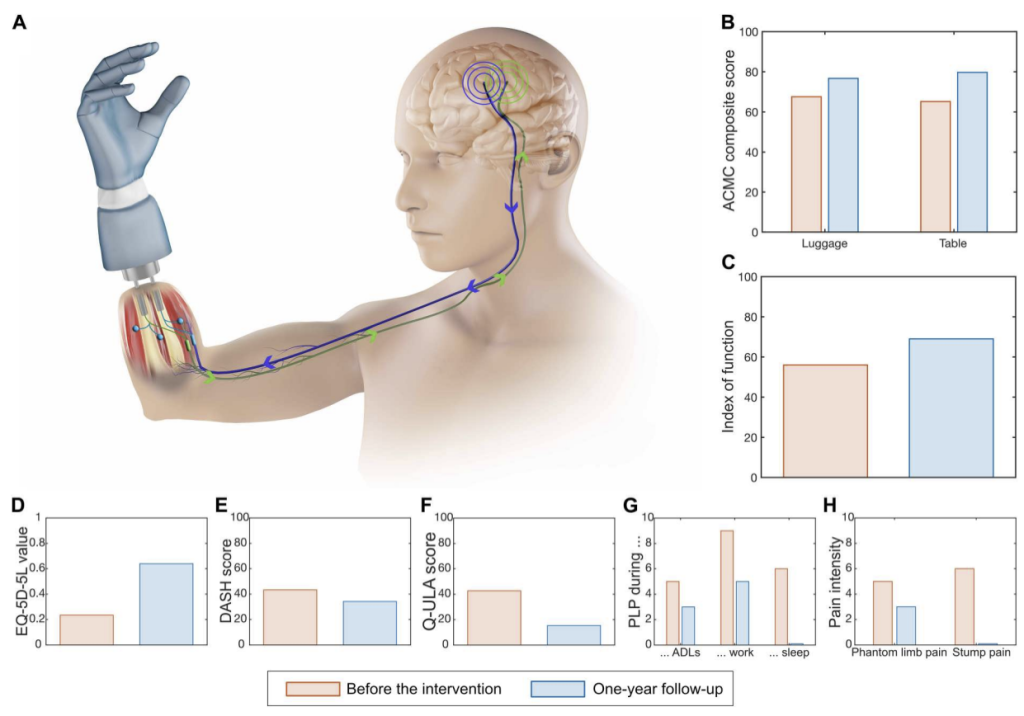
For instance, in the sub-field of upper-limb prostheses, Ortiz-Catalan et al. describes a highly integrated bionic hand that uses neural control and sensory feedback via an osseointegrated implant, allowing the prosthesis to communicate directly with residual nerves and bones (2023). Titanium rods were implanted into the bones and electrodes into the muscles and nerves to create natural control and sensory feedback. The neuromusculoskeletal interface, using an osseointegrated implant engineered to enable bidirectional communication between electrodes and the prosthesis, mitigates common issues such as discomfort and/or unreliable prosthetic control.
In the sub-field of lower-limb prostheses, researchers Azocar et al. were able to build an open source bionic limb. In terms of hardware, the prosthesis combines knee and ankle joints using high-toque and low-cost motors from drones. They produce 2-10 more torque than the average prosthetic leg which allows for more natural movement. The series-elastic actuator, which uses springs, helps with force control which makes movements smoother and more adaptive. The hardware design is highly customizable in general and relatively economical which makes it convenient for outside researchers. In terms of software, it has a hierarchical control system: low-level control (precise joint movements), mid-level control (translate user intent into a sequence of joint movements), high-level control (recognition of user intent and adjust the ambulation mode). While their product does not use electrical signals from the residual limb for more refined movement, they use sophisticated software and hardware designs to build a robust prosthetic (2020).
3.2 Bionic Eyes:
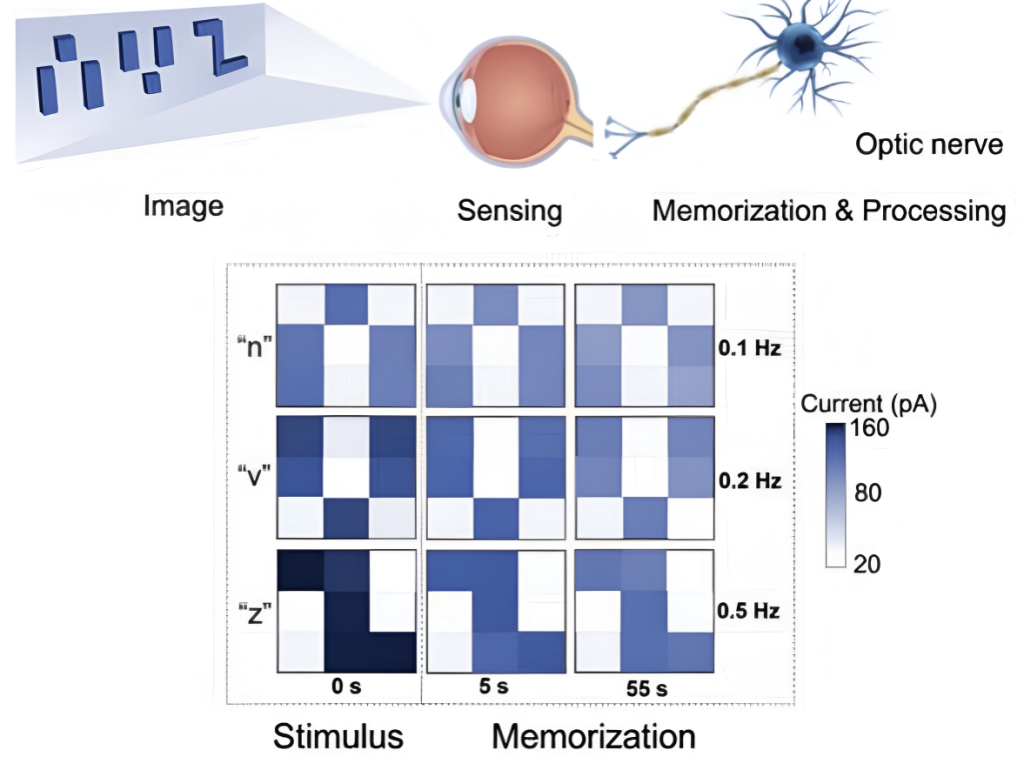
The replication of complex sensory organs such as the bionic eye exemplifies the expanding scope of bionic devices. Vision is a multi-step process: environmental light is focused onto the retina, converted into neural signals, transmitted via the optic nerve, and processed through layered brain regions that analyze features, interpret the scene, and generate responses. The machine vision process involves capturing optical images and then converting them into digital signals. These are then processed through the image processor (most commonly GPU) where they integrate machine vision perceptions and recognition algorithms (CNN, RNN, YOLO). The outputs are then used for something actionable. The primary missing ingredient in these neural network algorithms that are found in our brain neurons are the complex temporal integration capabilities (Zhang & Lee, 2022). Hence, researchers in this study have looked to develop not only how well the visuals can be captured, but how they are processed and stored for higher level brain functions.
For example, Zhang et al. introduce a neuromorphic broadband vision device that mimics biological photoreceptors using a TIPS-pentacene-based phototransistor array retina (2023). The device tries to mimic how neurons may react to light, in order to handle visual sensing and memory tasks efficiently.
3.3 Interface Devices:
Development in neural interfaces underpin some of the most advanced bionic solutions available in present time. They are what are developed to control the bidirectional prostheses by decoding motor commands from the signals or stimulating afferent pathways to restore sensation. From the hardware end, optimal access to the nervous system requires invasive procedures interfacing the nerve pathways. From the software end, mathematical modelling is required to decode neural information to produce motor outputs that reliably predict the intention of the user (Pasluosta et al., 2022).
As mentioned previously, Ortiz-Catalan et al used a neuromusculoskeletal interface, via an osseointegration, which allowed for seamless bi-directional communication between the electrodes and prosthesis, which in turn facilitated precise bionic movement (2023).
4. Technological Advancements and State-of-the-Art
This section consists of the state-of-the-art research in materials (Section 4.1), Sensors and Actuators (Section 4.2), Neural Interfaces (Section 4.3), and Machine Learning Classification (Section 4.4), which are summarized in Figure 6.
4.1 Materials:
4.1.1 Osseointegrated Implants:
The use of titanium rods embedded into bones offers a durable and biocompatible platform to facilitate direct skeletal attachment. The efficacy hinges on the osseointegration, addressing prior issues of discomfort and instability with socket-based mechanics (Ortiz-Catalan et al., 2023).
4.1.2 Neuromorphic Device Materials:
These devices utilize organic materials such as TIPS-pentacene to develop flexible, broadband phototransistors capable of mimicking biological visual sensors.It responds to a broad range of light wavelengths, similar to the human eye. The device also tries to mimic how neurons may react to light, in order to handle visual sensing and memory tasks efficiently (Zhang et al., 2023).
Other materials such as perovskite nanowire arrays have been used to build a retina that can perform filter-free color detection. The nanowire array also produces photocurrent without external bias which enables self-powered operations (Long et al., 2023).
4.2 Sensors and actuators:
4.2.1 Bidirectional Control Systems:
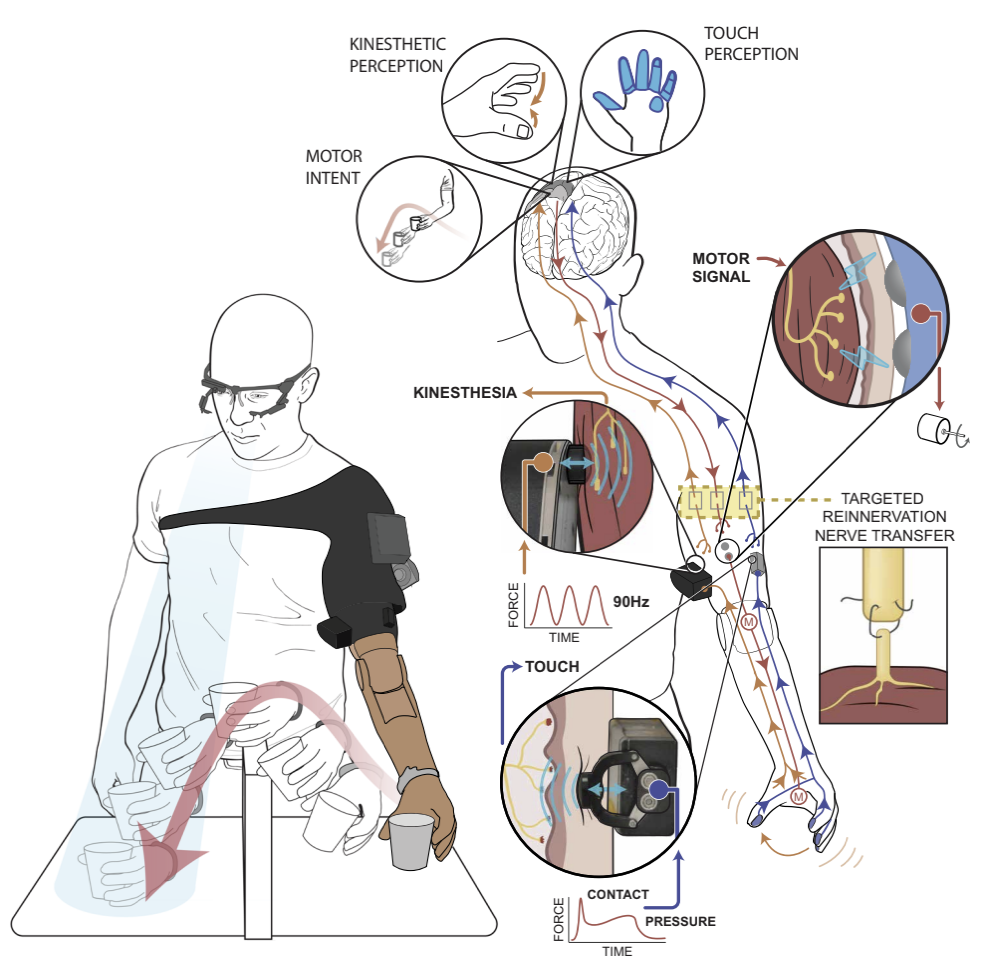
These use advanced sensor arrays and actuators that decode neural signals (EMG, nerve signals) and provide sensory feedback. This addresses the limitation of unidirectional control of passive prostheses that fail to create embodiment with the human body (Pasluosta et al., 2022).
4.2.2 Sensory Devices:
Incorporation of sensory devices such as thermal sensors linked neural feedback pathways, allow for temperature perception, which help humans embody their prosthetic limb more readily due to increased alignment with an intact biological limb (Ortiz-Catalan, 2024).
4.3 Neural interfaces:
4.3.1 Invasive Neural Interfaces:
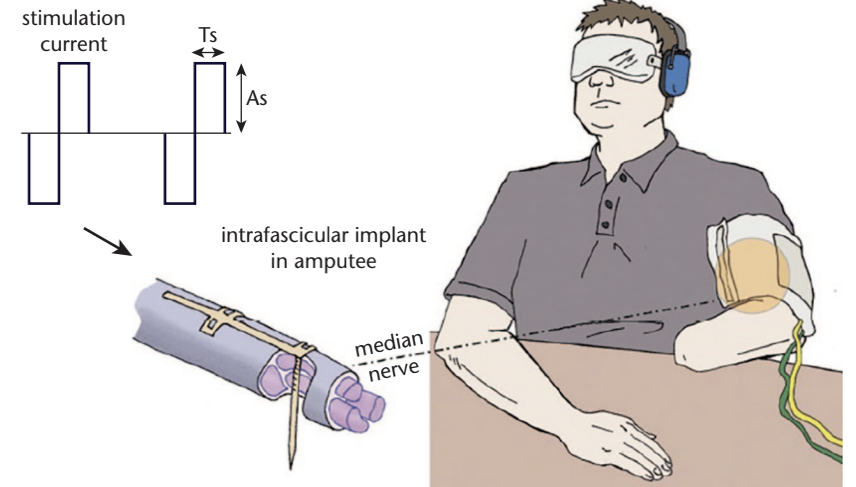
These deploy direct nerve muscle interfacing with surgically implanted electrodes to collect stronger ENG Signals which allows for greater selectivity. These methods provide precise control and sensory feedback but face challenges such as the increased risk of damaging the nerve due to its invasive nature (Ortiz-Catalan, 2024).
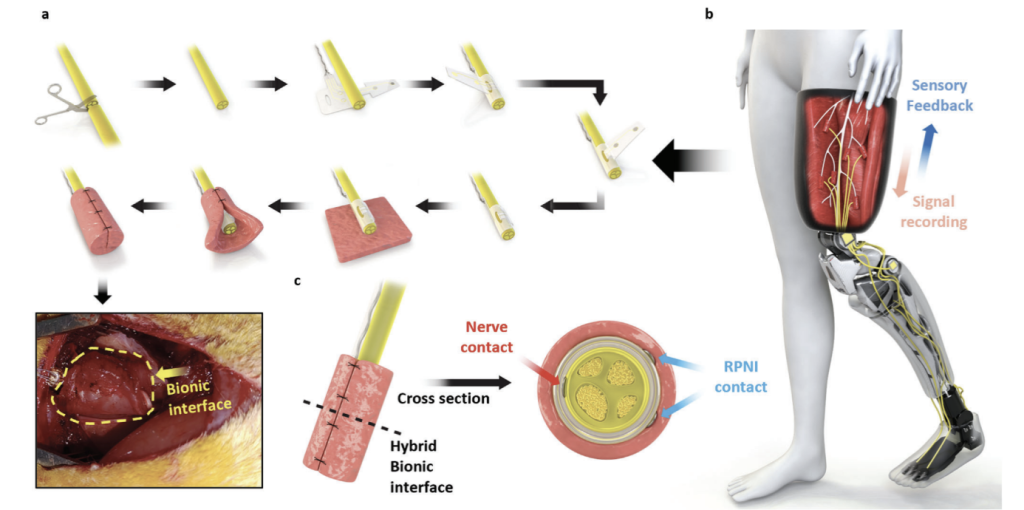
4.3.2 Hybrid Interfaces
Surface EMG (electrical signals from the muscles) electrodes remains the primary non-invasive approach. While it is safer, it struggles to achieve as powerful signals as more invasive electrodes. Recent innovations such as the regenerative peripheral nerve interface (RPNI) with a peripheral neural interface records signals from both the nerve and muscle graft and controls a robotic leg. The results suggest that it enhanced prosthetic control compared to singular approaches (Cho et al., 2023).
4.3.3 Osseointegrated Neural Interfaces
The use of titanium implants have created a bridge between the skeletal system, and nerves and muscles which has enabled robust, bidirectional communication that imitates natural proprioception. It effectively combines control and sensation within a single interface (Ortiz-Catalan et al., 2023).
4.4 Machine Learning Classification:
4.4.1 Reinforcement Learning:
Reinforcement Learning is one of the optimization techniques deployed by researchers to improve the robustness and accuracy of bionic limb controllers that decode motor intent into actual movements. Researchers Freitag et al. test out this method by essentially fine-tuning a pretrained control policy with dynamic EMG data from a Guitar Hero-type game environment (2023). Initial results indicate that it is a promising path to explore for more refined control, particularly for prosthetic hands since human hands require greater number of degrees of freedom than its lower-limb counterparts.
4.4.2 Arbitrary Control:
Arbitrary control refers to a control strategy where gesture-to-movement mappings are not based on natural or biological mimicry. Unlike the more traditional biomimetic control, this approach emphasizes functionality and flexibility over biological similarity. The training emphasized developing control schemes from scratch, without relying on natural movement patterns. Schone et al. found out that not only does it perform almost as well as biomimetic control in terms of speed, dexterity, and gesture switching, but it has better increased generalization to control mapping (2024). However, it would be more cognitively demanding to learn these new unintuitive associations between muscle activation and bionic movement
5. Patient Adaptation
5.1 Performance Metrics:
The review shows that most of the work documented in research papers for bionic solutions represent early experimental or POC stage rather than widespread clinical application. For instance, the aforementioned integrated neuromusculoskeletal prosthesis trial was conducted on a single participant with below-elbow amputation. While the performance metric showcased promising results – task score improved from 65 to 80 – these still come from a limited sample size with numerous variables, and cannot be indicative of broad clinical adoption (Ortiz-Catalan et al., 2023).
Widespread adoption requires large-scale validation – thousands of participants, regulatory approvals and integration into standard prosthetic care pathways.
5.2 Motor Function Improvements:
Advancements in neural interfaces, surgical techniques and biomechanical analysis have already begun to produce tangible improvements in motor control, functionality, and rehabilitation outcomes. For example, De Marchis et al performed a multimodal prosthetic gait assessment using datasets collected on individuals with different amputations and prosthetics. This study is for analyzing movement neural control and mechanical actuation of prosthetic limb as a whole that can facilitate better prosthetic design and therapies for patients (Frossard et al., 2022).
5.3 Qualitative Studies:
The incorporation of qualitative studies across several research papers highlight the importance of user satisfaction when it comes to receiving bionic augmentations. Generally, amputees face issues with their residuum health such as physical discomfort or mental distress. Hence, for the success of bionic solutions, it is important to listen to the users and acknowledge their impression of the device. In Ortiz-Catalan’s paper, the received experiential questionnaires suggest that quality of life improved as a result of using the neuromusculoskeletal prosthesis, with scores suggesting lower perceived disability, and reduced intensity of stump and phantom limb pain (2023).
6. Technical and Ethical Obstacles
The challenges and limitations from developing advanced bionic solutions can be found across several domains which include technical, biological and ethical issues.
6.1 Technical Challenges:
6.1.1 Durability:
Prosthetic systems face issues with long-term durability. Physical components such as electrodes and neural implants are liable to mechanical wear, electrode degradation, and scar tissue formation, none of which are easily repairable or maintainable (Amin, 2022).
6.1.2 Power Supply:
Bionic devices, particularly neural prostheses with sensory feedback and control algorithms require efficient and long-lasting power sources. The need for miniaturized, reliable batteries can limit device operation time and increase the need for recharging or replacement. This is especially true for bionic eye devices that are trying to create the sensing, processing and memory capabilities of a biological eye (Zhang et al., 2023).
6.1.3 Signal Reliability
Electrical signals collected from the brain, nerves or muscles are susceptible to noise which complicates decoding the signals into proper movement classifications. For example, EMG can be affected by muscle fatigue or neighboring electrical activity, which reduces control reliability (Freitag et al., 2023).
6.2 Surgical Risks
6.2.1 Encapsulation:
Invasive neural interfaces or osseointegration can elicit negative immune responses from the body. Without more tissue engineered neural interfaces that integrate encapsulated neural cells within the electrodes, scar tissue formation is an issue which can lead to decreased biocompatibility (Amin, 2022).
6.2.2 Infection Risks
While osseointegrated bionic limbs substantially improve mobility and general quality of life, it can cause issues such as bone fracture, infections, and breakage of the implant part. In other words, it’s not likely to work out well in a prolonged period without regular monitoring and cautiousness from the healthcare clinic and user respectively.
6.3 Patient Concerns
6.3.1 Patient Privacy:
Prosthetic devices collect biological data such as neural signals and motor intentions in order to analyze and perform the required bionic movements as discussed in great length in previous sections. Ensuring secure data transmission and storage is critical to protect users, not only from potential privacy breaches but unauthorized access to data that could be tampered with and lead to harmful effects for the prosthetic device user. For example, Prochor and Frossard’s diagnostic device collects information from the sensors implanted in the bionic limb to monitor performance and make suggestions accordingly (Prochor et al., 2021). If one were to trifle with the sensory data – which would lead to misdiagnosis – it could put the user in severe harm’s way.
6.3.2 Cost Effectiveness
Advanced bionic technologies are often costly and require specialised surgical and rehabilitation procedures. Ensuring equitable access, particularly in underdeveloped regions or in struggling socioeconomic groups, presents a challenging situation pertaining to resource allocation, fairness and affordability.
There is a clear disparity in prosthetic access between high-income and low-income regions. Prosthetic manufacturing is typically concentrated in developed countries. Hence, there is a major reliance on imports of these devices which presents logistical challenges such as long waiting times, high shipping costs, and high consumer costs. Moreover, there is a scarcity in prosthetic clinics and specialists who would be able to guide the user through their prosthetic device integration which can pose higher failure rates.
7.Emerging Fields
Given the latest innovations in bionic devices, the future will see bionic limbs into highly integrated, intelligent, and fully embodied systems capable of restoring function and sensation in a manner that resembles human biology (Figure 8).
7.1 Integration of Human Physiology, Prosthetics, and AI:
Emerging research is increasingly focussing on integrated closed-loop systems that combine sensory feedback with motor control to create more natural and intuitive prosthetic functions. For instance, Pasluosta emphasizes the importance of bidirectional interfaces that can stimulate afferent pathways, improving one’s proprioception and enabling an increased sense of embodiment (2022).
Future developments are likely to explore incorporation of physiological signals like temperature, pressure, and moisture too, which would enhance the user’s experience with their prosthetic limb. As Ortiz-Catalan showed, phantom maps and compact thermal stimulation devices that can be leveraged to provide thermal sensations for the user’s prosthetic limb (2024). Given the physical disadvantages – discomfort, heaviness, reduced mobility – that come with these early prototypes of these sensory components, it may not be practical to incorporate such devices in the short term. However, it provides the user an array of options that would allow them to customize their bionic device as they would desire.
7.2 AI in Decoding
AI, especially machine learning algorithms and techniques like reinforcement learning, is poised to exponentially improve prosthetic control systems. Freitag et al. illustrate how RL can optimize control policies for their recognition system pattern by training bionic hands in dynamic, game-like environments, making the decoding of signals more accurate (2023). Similarly, Schone et al. show how arbitrary control systems provide increased generalizations to new mappings after several rounds of training (2024).
In the future, AI can be expected to enable prostheses to learn and adapt to individual users’ movement patterns relatively quickly and with accuracy, which not only personalizes the control but allows for a reduced adaptation period.
7.3 Fully Implantable Systems
Powering advanced implanted neural interfaces and feedback mechanisms is a promising field for creating more self-sufficient and pain-free devices. Implantable systems like osseointegrated implants have been able to minimize experience of discomfort and enable bi-directional communication which allows for seamless limb operations.
Such innovations make prostheses more autonomous and comfortable for users. As these become more refined, user intervention and device maintenance – in case of any movement malfunction or extreme discomfort – will be minimized
8. Conclusion
Innovations such as bidirectional neural interfaces, sensory feedback mechanisms, reinforcement learning for control, and fully implantable energy solutions are demonstrating promising potential to enhance prosthetic functionality, comfort, and user experience. These developments could significantly improve the quality of life for amputees by providing prostheses that can restore biological limb functionalities in both movement and sensation.
The significance of these findings lies in their capacity to revolutionize prosthetic rehabilitation—transforming devices from merely functional tools into seamless extensions of the body, capable of restoring complex motor and sensory functions. The potential impact includes increased independence, reduced phantom limb pain, broader range of high-performance prosthetics, and a better overall quality of life for the amputee.
Looking ahead, there is a critical need for further research to integrate these emerging technologies into affordable, reliable, and user-friendly solutions. Future opportunities encompass developing fully autonomous, adaptive systems powered by AI, and expanding upon sensory feedback system designs to encompass as many environmental cues as possible. Beyond just technical work, ethical concerns need to be considered too so that the technology can reach substantially more people who are in need. Addressing these needs will be essential to realize fully functional, life-like prosthetic limbs that improve rehabilitation outcomes and profoundly enhance human mobility and perception.
About the Author
Tauhid Shifat A Noor received his B.Sc Degree in Mathematics-Computer Science from University of California, San Diego in 2024. His current research interests include retrieval-augmented generation, integration of large language models into applied domains, machine learning techniques in bionic solutions, and computer vision applications.
References
Amin, K. R. (2022). Bionic limb replacement: an evolving concept in lower extremity reconstruction. Plastic and Aesthetic Research, 9(3), 24. https://doi.org/10.20517/2347-9264.2021.119
Azocar, A. F., Mooney, L. M., Duval, J., Simon, A. M., Hargrove, L. J., & Rouse, E. J. (2020). Design and clinical implementation of an open-source bionic leg. Nature Biomedical Engineering, 4(10), 941–953. https://doi.org/10.1038/s41551-020-00619-3
Bumbaširević, M., Lesic, A., Palibrk, T., Milovanovic, D., Zoka, M., Kravić-Stevović, T., & Raspopovic, S. (2020). The current state of bionic limbs from the surgeon’s viewpoint. EFORT Open Reviews, 5(2), 65–72. https://doi.org/10.1302/2058-5241.5.180038
Cho, Y., Jeong, H. H., Shin, H., Pak, C. J., Cho, J., Kim, Y., Kim, D., Kim, T., Kim, H., Kim, S., Kwon, S., Hong, J. P., Suh, H. P., & Lee, S. (2023). Hybrid bionic nerve interface for application in bionic limbs. Advanced Science, 10(35). https://doi.org/10.1002/advs.202303728
Dosen, S. (2023). Toward self-contained bidirectional bionic limbs with high information throughput. SCIENCE ROBOTICS.
Freitag, K., Laezza, R., Zbinden, J., & Ortiz-Catalan, M. (2023). Improving bionic limb control through reinforcement learning in an interactive game environment. ICML.
Frossard, L., Conforto, S., & Aszmann, O. C. (2022). Editorial: Bionics limb prostheses: Advances in clinical and prosthetic care. Frontiers in Rehabilitation Sciences, 3. https://doi.org/10.3389/fresc.2022.950481
Guo, K., Lu, J., Wu, Y., Hu, X., & Yang, H. (2024). The Latest Research Progress on Bionic Artificial Hands: A Systematic Review. Micromachines.
Long, Z., Qiu, X., Chan, C. L. J., Sun, Z., Yuan, Z., Poddar, S., Zhang, Y., Ding, Y., Gu, L., Zhou, Y., Tang, W., Srivastava, A. K., Yu, C., Zou, X., Shen, G., & Fan, Z. (2023). A neuromorphic bionic eye with filter-free color vision using hemispherical perovskite nanowire array retina. Nature Communications, 14(1). https://doi.org/10.1038/s41467-023-37581-y
Marasco, P. D., Hebert, J. S., Sensinger, J. W., Beckler, D. T., Thumser, Z. C., Shehata, A. W., Williams, H. E., & Wilson, K. R. (2021). Neurorobotic fusion of prosthetic touch, kinesthesia, and movement in bionic upper limbs promotes intrinsic brain behaviors. Science Robotics, 6(58). https://doi.org/10.1126/scirobotics.abf3368
Ortiz-Catalan, M. (2024). Thermally sentient bionic limbs. Nature Biomedical Engineering, 8(8), 938–940. https://doi.org/10.1038/s41551-023-01174-3
Ortiz-Catalan, M., Zbinden, J., Millenaar, J., D’Accolti, D., Controzzi, M., Clemente, F., Cappello, L., Earley, E. J., Mastinu, E., Kolankowska, J., Munoz-Novoa, M., Jönsson, S., Cipriani, C., Sassu, P., & Brånemark, R. (2023). A highly integrated bionic hand with neural control and feedback for use in daily life. Science Robotics, 8(83). https://doi.org/10.1126/scirobotics.adf7360
Pasluosta, C., Kiele, P., Čvančara, P., Micera, S., Aszmann, O. C., & Stieglitz, T. (2022). Bidirectional bionic limbs: a perspective bridging technology and physiology. Journal of Neural Engineering, 19(1), 013001. https://doi.org/10.1088/1741-2552/ac4bff
Prochor, P., Frossard, L., & Sajewicz, E. (2021). The future of bionic limbs. Research Features, 134. https://doi.org/10.26904/rf-134-7477
Schone, H. R., Udeozor, M., Moninghoff, M., Rispoli, B., Vandersea, J., Lock, B., Hargrove, L., Makin, T. R., & Baker, C. I. (2024). Biomimetic versus arbitrary motor control strategies for bionic hand skill learning. Nature Human Behaviour, 8(6), 1108–1123. https://doi.org/10.1038/s41562-023-01811-6
Song, H., Hsieh, T., Yeon, S. H., Shu, T., Nawrot, M., Landis, C. F., Friedman, G. N., Israel, E. A., Gutierrez-Arango, S., Carty, M. J., Freed, L. E., & Herr, H. M. (2024). Continuous neural control of a bionic limb restores biomimetic gait after amputation. Nature Medicine, 30(7), 2010–2019. https://doi.org/10.1038/s41591-024-02994-9
Xu, Y., Sun, Z., Bai, Z., Shen, H., Wen, R., Wang, F., Xu, G., & Lee, C. (2024). Bionic e-skin with precise multi-directional droplet sliding sensing for enhanced robotic perception. Nature Communications, 15(1). https://doi.org/10.1038/s41467-024-50270-8
Zhang, H., Ju, X., Chi, D., Feng, L., Liu, Z., Yew, K., Zhu, M., Li, T., Wei, R., Wang, S., Sun, L., Wang, Z., & Wu, Y. (2023). A neuromorphic bionic eye with broadband vision and biocompatibility using TIPS-pentacene-based phototransistor array retina. Applied Materials Today, 33, 101885. https://doi.org/10.1016/j.apmt.2023.101885
Zhang, H., & Lee, S. (2022). Robot Bionic Vision Technologies: a review. Applied Sciences, 12(16), 7970. https://doi.org/10.3390/app12167970
Rivera, J. A., Churovich, K., Anderson, A. B., & Potter, B. K. (2024). Estimating recent US limb loss prevalence and updating future projections. Archives of Rehabilitation Research and Clinical Translation, 6(4), 100376. https://doi.org/10.1016/j.arrct.2024.100376
About the author

Tauhid Noor
Tauhid Shifat A Noor received his B.Sc Degree in Mathematics-Computer Science from University of California, San Diego in 2024. His current research interests include retrieval-augmented generation, integration of large language models into applied domains, machine learning techniques in bionic solutions, and computer vision applications.